倒車雷達單元接口電路設計

設計中倒車雷達以PIC18F258單片機為控制核心,控制超聲波發射接收電路、溫度修正電路工作。 PIC18F258單片機本身帶有CAN總線,這樣可以減小電路的復雜性。超聲波發射電路發出40 kHz的超聲波,經障礙物反射后探頭接收到反射波,單片機根據發射和接收時間差計算出障礙物與車的距離,并通過CAN總線以報文形式發送到儀表單元并顯示,也可送到音響單元進行語音報警,當距離小于一定值時,相應的制動單元自動剎車。溫度補償電路采用數字溫度傳感器DS18B20,利用聲速和溫度之間的關系對聲速進行校正,從而消除溫度變化對聲音的影響。
本文引用地址:http://www.j9360.com/article/201710/369506.htm倒車雷達單元接口電路設計
CAN單元的硬件構成一般有兩種形式。一種形式是內部集成CAN控制器的微控制器加上收發器;另外一種形式是通用微控制器加上獨立CAN控制器再加上收發器。本設計采用前一種形式,不占用微控制器的端口資源,可以簡化接口電路的設計。考慮到汽車是在非常特殊的環境下工作,所以選擇了滿足汽車溫度變化范圍且性價比較高的Mierochip公司的PIC18F258單片機,該芯片內部集成了CAN控制器,可以簡化系統的硬件設計、提高系統的可靠性。倒車雷達單元與CAN總線接口硬件電路如圖3所示,主要由PIC18F258單片機,6N137高速光電耦合器,PCA82 C250總線收發器三部分組成。
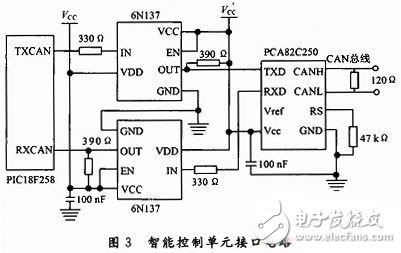
為了提高系統的抗干擾能力和傳輸信號的能力,采用6N137高速光電耦合電路可以很好地實現總線上單元之間的電氣隔離。高速光電耦合器的兩個電源Vcc和V‘cc必須采用電源隔離電路進行完全隔離。











評論