吸塵機器人控制系統電路設計 —電路圖天天讀(48)

清潔機器人是服務機器人的一種,可以代替人進行清掃房間、車間、墻壁等。提出一種應用于室內的移動清潔機器人的設計方案。其具有實用價值。室內清潔機器人的主要任務是能夠代替人進行清掃工作,因此需要有一定的智能。清潔機器人應該具備以下能力:能夠自我導航,檢測出墻壁,房間內的障礙物并且能夠避開;能夠走遍房間的大部分空間,可以檢測出電池的電量并且能夠自主返回充電,同時要求外形比較緊湊,運行穩定,噪音小;要具有人性化的接口,便于操作和控制。結合清潔機器人主要功能探討其控制系統的硬件設計。
本文引用地址:http://www.j9360.com/article/201710/369458.htm傳統的微處理器如51系列雖然開發周期短,成本低,但其實時性不好,難以實現復雜的控制算法;另外,增加的外圍電路數據轉換速度慢,使機器人的性能得不到充分的發揮。高速DSP的出現雖然使得系統模塊化和全數字化,但其開發成本高。與DSP具有同等性能的ARM微處理器資源豐富,具有很好的通用性,其主要技術優點是高性能,低價格,低功耗,廣泛地應用于各個領域,因此將ARM應用于機器人控制系統不失為一種好的策略。LPC2210是飛利浦帶有一個支持實時仿真和跟蹤的ARM7TDMI-S微處理器,其采用3級流水線技術,能夠并行處理指令。由于具有非常小的尺寸和極低的功耗,多個32位定時器、PWM輸出和32個GPIO使它特別適用于工業控制和小型機器人系統,滿足了機器人對控制器運算速度的要求。以LPC2210為核心。設計結構簡單,性能穩定的清潔機器人車體系統。
紅外接近傳感器電路設計
反射式光電開關是由紅外LED光源和光敏二極管或光敏晶體管等光敏元件組成,當有障礙物阻攔時光線能夠反射回來,輸出為低電平信號;當沒有障礙物阻攔時,光線不能反射回來,輸出為高電平信號。吸塵機器人的近距離紅外接近傳感器由兩組相同的紅外發射、接收電路組成。每一組電路可分為高頻脈沖信號產生、紅外發射調節與控制、紅外發射驅動、紅外接收等幾個部分。通過38kHz晶振和非門電路得到一個38kHz的調制脈沖信號;利用三極管驅動紅外發射管(TSAL6200)的發射。發射管發出的紅外光經物體反射后被紅外接收模塊接收。通過接收頭(HS0038B)內部自帶的集成電路處理后返回一個數字信號,輸入到微控制器的I/O口,如圖3所示。接收頭如果接收到38kHz的紅外脈沖就會返回輸出低電平,否則就會輸出高電平。通過對I/0口的檢測,便可以判斷物體的有無。

兩種電機控制系統電路設計
在小功率系統中,直流電機線性特性良好,控制性能優越,適合于點位和速度控制。為了實現直流電機的正反轉運行,只需要改變電機電源電壓的極性。電壓極性的變化和運行時間的長短可以由處理器實現,而提供直流電機正常運行的電流則需要驅動電路。
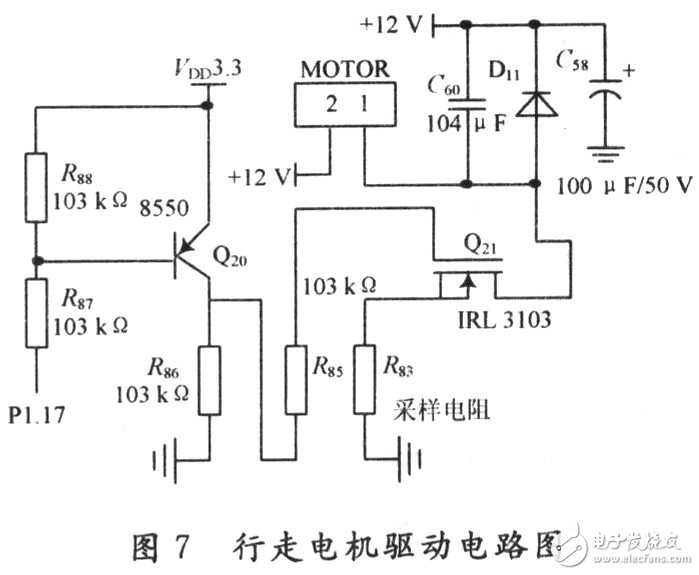
H橋式驅動電路是比較常用的驅動電路。該設計兩個行走驅動電機采用分立器件功率場效應管和續流二極管搭建,成本低,便于散熱,如圖所示。
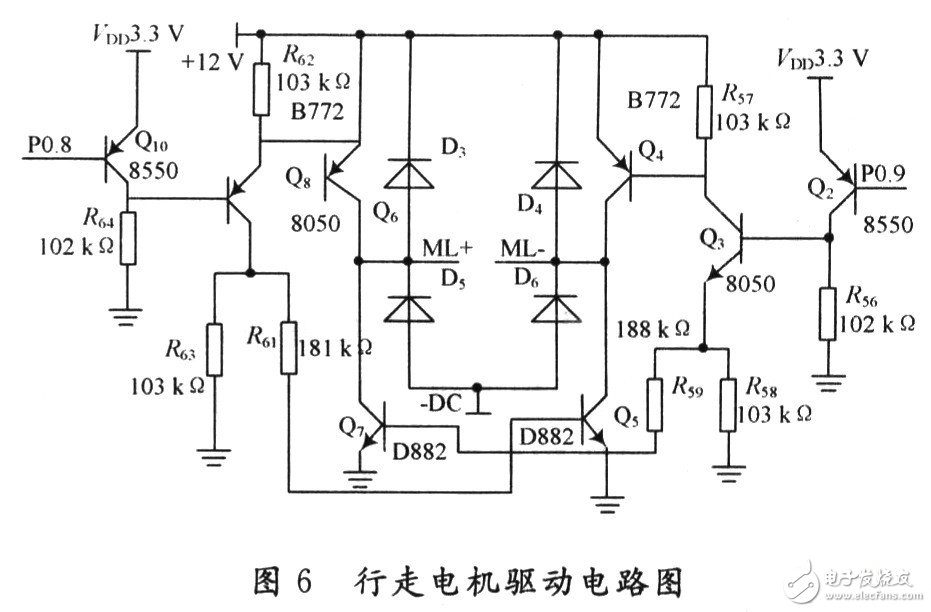
用ARM7的P0.8和P0.9來控制電機,這兩個管腳都是PWM輸出管腳,可以控制電機的速度。該部分主要保證機器人能夠在平面內移動,同時輪上帶有編碼器,可以對行走的路程進行檢測。通過航位推算可以實現機器人的轉彎,假設機器人光電碼盤的分度數為N;控制器收到的脈沖數為m;輪子的直徑為D;兩個輪子之間的間距為W,則輪子前進的距離即可算得。
電子發燒友網技術編輯點評分析:
清潔機器人作為服務機器人的一種,有著巨大的市場潛力和廣闊的應用前景。隨著傳感技術的發展和微處理器的不斷進步,價格也在不斷下降。在此研究和設計一個基于ARM7微處理器的清潔機器人控制系統,不僅滿足了實用性的要求,而且在不增加成本的基礎上為軟件提供了良好的硬件支持,為更好的算法和軟件升級提供良好的技術支持。若讀者對機器人技術感興趣,不妨多探討一下未來發展趨勢以及最新革新技術走勢等等。
大家如有問題,歡迎在評論處討論。
——電子發燒友網整理,轉載請注明出處!











評論