精妙的單片機非阻塞延時程序設計教學案例

對于每個單片機愛好者及工程開發設計人員,在剛接觸單片機的那最初的青蔥歲月里,都有過點亮跑馬燈的經歷。從看到那一排排小燈按著我們的想法在跳動時激動心情。到隨著經驗越多,越來又會感覺到這個小燈是個好東西,尤其是在調試資源有限的環境中,有時會幫上大忙。
本文引用地址:http://www.j9360.com/article/201710/365448.htm但對于絕大多數人,我們在最最初讓燈閃爍起來時大約都會用到阻塞延時實現,會像如下代碼的樣子:
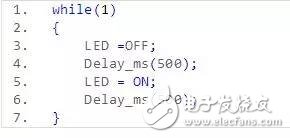
然后,在我們接觸到定時器,我們會發現,原來用定時中斷來處理會更好。比如我們可以500ms中斷一次,讓燈亮或滅,其余的時間系統還可以做非常之多的事情,效率一下提升了很多。
這時我們就會慢慢意識到,第一種(阻塞延時)方法效率很低,讓芯片在那兒空運行幾百毫米,什么也不做,真是莫大的浪費,尤其在芯片頻率較高,任務又很多時,這樣做就像在平坦寬闊的高速公路上挖了一大坑,出現事故可想而知。
但一個單片機中的定時器畢竟有限,如果我需要幾十個或者更多不同時間的定時中斷,每一個時間到都完成不同的處理動作,如何去做呢。一般我們會想到在一個定時中斷函數中再定義staTIc 變量繼續定時,到了所需時間,做不同的動作。而這樣又會導致在一個中斷里做了很多不同的事情,會搶占主輪詢更多時間,有時甚至喧賓奪主,并也不是很如的思維邏輯。
那么有沒有更好的方法來實現呢,答案是肯定的。下面介紹我在一個項目中偶遇,一個精妙設計的非阻塞定時延時軟件的設計(此設計主要針對于無操作系統的裸機程序)。
在上篇文章中有對sysTIck的介紹,比如我要設置其10ms中斷一次,如何實現呢?
也很簡單,只需調用core_cm3.h文件中 SysTIck_Config函數 ,當系統時鐘為72MHZ,則設置成如下即可SysTIck_Config(720000); (遞減計數720000次后中斷一次) 。此時SysTick_Handler中斷函數就會10ms進入一次;
任務定時用軟件是如何設計的呢 ?
且先看其數據結構,這也是精妙所在之處,在此作自頂向下的介紹:
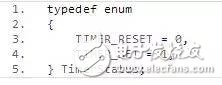
其定義結構體類型如:
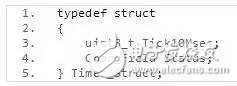
其中Char_Field 為一聯合體,設計如下:
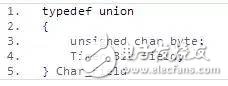
而它內部的Timer_Bit是一個可按位訪問的結構體:
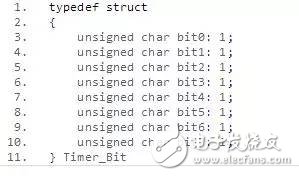
此聯合體的這樣設計的目的將在后面的代碼中體現出來。
如此結構體的設計就完成了。
然后我們定義的一全局變量,Timer_Struct gTimer;
并在頭文件中宏定義如下:
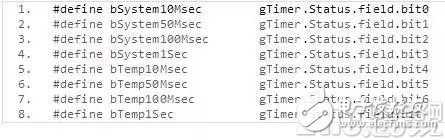
另外為了后面程序清晰,再定義一狀態指示:
至此,準備工作就完成了。下面我們就開始大顯神通了!
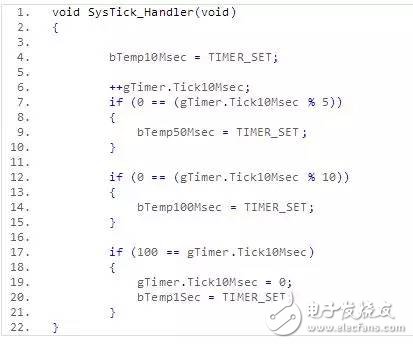
首先,10ms定時中斷處理函數如,可以看出,每到達10ms 將把bTemp10Msec置1,每50ms 將把bTemp50Msec置1,每100ms 將把bTemp100Msec置1,每1s 將把bTemp1Sec置1,
而這又有什么用呢 ?
這時,我們需在主輪詢while(1)內最開始調用一個定時處理函數如下:
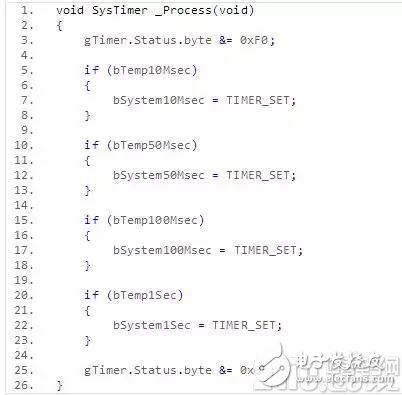
此函數開頭與結尾兩句:

就分別巧妙的實現了bSystemXXX (低4位) 和 bTempXXX(高4位)的清零工作,不用再等定時到達后還需手動把計數值清零。此處清零工作用到了聯合體中的變量共用一個起始存儲空間的特性。
但要保證while(1)輪詢時間要遠小于10ms,否則將導致定時延時不準確。這樣,在每輪詢一次,就先把bSystemXXX ,再根據bTempXXX判斷是否時間到達,并把對應的bSystemXXX 置1,而后面所有的任務就都可以通過bSystemXXX來進行定時延時,在最后函數退出時,又會把bTempXXX清零,為下一次時間到達后查詢判斷作好了準備。
說了這么多,舉例說明一下如何應用:
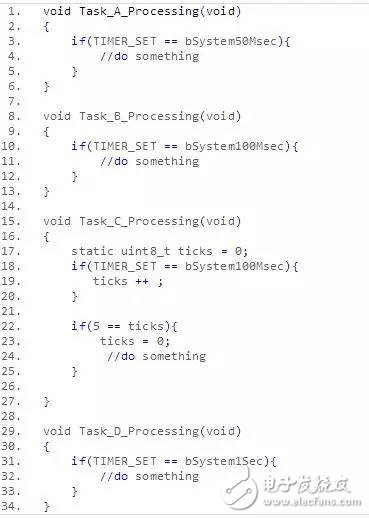
以上示例四個任務進程,
在主輪詢里可進行如下處理:
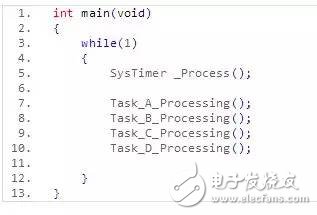
這樣,就可以輕松且清晰實現了多個任務,不同時間內處理不同事件。(但注意,每個任務處理中不要有阻塞延時,也不要處理過多的事情,以致處理時間較長。可設計成狀態機來處理不同任務。)











評論