旋轉拍攝無線供電膠囊內窺鏡系統

作者 孫曉偉 天津市賽盟醫療科技有限公司(天津 300384)
本文引用地址:http://www.j9360.com/article/201706/361129.htm孫曉偉(1985-),男,碩士,中級工程師,研究方向:醫療器械研發與設計工作。
摘要:傳統膠囊內窺鏡采用氧化銀電池,通過無線通訊方式將圖像信息從體內傳輸到體外,從而減輕患者檢查痛苦,但會存在電池工作時間受限,腸道內褶皺漏拍現象,新型膠囊內窺鏡采用無線供電方式,圖像傳感器隨膠囊運動360度旋轉拍攝,有效避免了漏拍等現象,拍攝的圖像合成處理,可以觀測整個小腸狀況,同時,圖像可以進行放大處理,便于醫師觀察。
序言
膠囊內窺鏡系統屬于一種在人體內工作的微型電子醫療系統,解決體內系統如何長時間在人體內正常工作,且盡量在對人體不造成副作用和不適的前提下,實現測量生命體內的生理、生化參數的長期變化及診斷、治療某些疾病,實現在生命體無拘束、自然狀態下的體內直接測量和控制功能 [1]。膠囊內窺鏡與傳統內窺鏡相比,有著顯著的特點和意義。從系統的組成和結構角度分析,膠囊內窺鏡系統不帶有引導插管和引線,在消化道檢查過程中采集的影像數據是通過非有線的方式從體內傳輸到體外,口服的膠囊部分體積小,能夠順利通過人體的全消化道,實現對常規內窺鏡方法無法檢查到的小腸的直接觀測[2]。
1 膠囊內窺鏡結構及工作原理
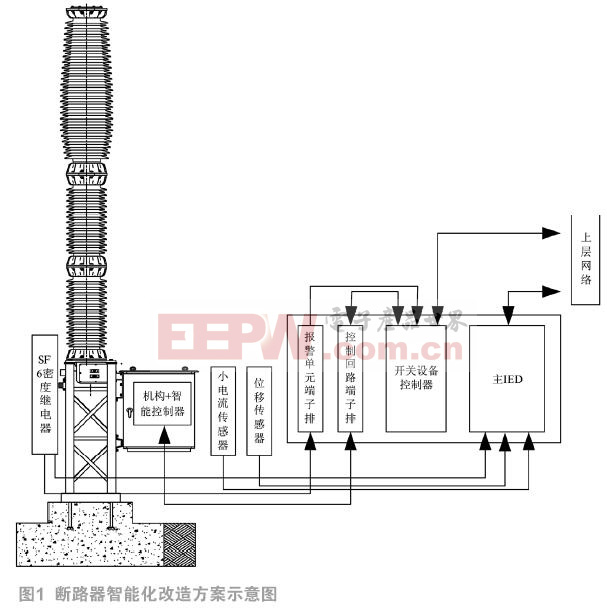
膠囊內部結構如圖1所示。
1為膠囊內窺鏡系統,10作為容納部件具有膠囊形狀。它具有透光的透過區域10a和遮光的遮光區域10d,透過區域在內窺鏡攝像機的長度方向上有一定的寬度,并形成在內窺鏡攝像機的周向上。為了抑制容納部件外表面上的附著污物,在其外表面上涂抹適用于人體的涂層。容納部件內表面上設置從該內表面突出的軸部10b和10c,這兩部分在旋轉軸線上[3]。
在軸部的外周上設置磁鐵12,容納部件內部設置有沿容納部件形狀的保持部件11,保持部件具有與軸部接觸的接觸部11a和11b。保持部件相對于容納部件在軸線X周圍旋轉。保持部件內壁上圍繞磁鐵的外周設置線圈或電磁鐵等磁場發生元件15。在圓形透過區域的周向上等間隔的設置4個發光元件17[4]。
鏡頭18朝向拍攝元件20的側面為具有正的光學能量的凸面,另一面為凹面。可以將CCD圖像傳感器或CMOS圖像傳感器作為拍攝元件,被攝體光透過鏡頭在拍攝元件的拍攝面上成像。拍攝元件通過光電變換處理將被攝體光變為電信號。控制器22控制拍攝元件的驅動,拍攝元件生成的圖像數據通過基板21發送到發送元件16。

生物體外電力供給裝置發送的電力傳輸給第一接收單元13和第二接收單元14。第一接收單元13具有磁芯13b和纏繞在磁芯上的線圈13a,第二接收單元同理具有14a和14b。第一接收單元與第二接收單元接收的電磁能發送給控制器22,并在控制器中產生驅動內窺鏡系統的驅動能量,該驅動能量用于控制器與拍攝元件的驅動或者向磁場發生元件通電[5]。
當控制器向磁場元件通電時,磁場發生,并通過與磁鐵的相互作用使保持部件相對于容納部件旋轉。膠囊內窺鏡系統被攝入到生物體內,并且容納部件緊密接觸生物體內的壁面。因為容納部件處于通過與體內的壁面接觸而被固定的狀態,所以保持部件相對于容納部件在軸線X的周圍旋轉。通過保持部件的旋轉,由保持部件保持的拍攝部件與發光元件也在軸線X的周圍旋轉。 發送元件向生物體外設置的接收裝置發送由拍攝元件生成的圖像數據。
2 系統設計路線
膠囊內窺鏡系統由膠囊本體、影像接收儀和影像與報告處理站三部分組成。設計路線應遵循如下9步。
1)膠囊內圖像傳感器對消化道影像的采集:該步驟是在啟動膠囊內電路上電后,膠囊內的圖像傳感器就開始進行一定幀率的影像采集工作;
2)影像的處理:對圖像傳感器采集的影像數據進行一定的影像處理,使采集的影像效果最佳;
3)影像的壓縮:由于一幀影像的像素點間有很大的相關性,如果對影像數據進行壓縮,可以大大減少膠囊內無線數據的傳輸量,從而減少膠囊內無線傳輸的能量,以及減少影像接收儀的存儲容量和工作站的存儲容量;
4)影像的無線傳輸:該階段主要完成把膠囊內處理和壓縮后的影像數據通過無線方式傳輸到體外影像接收儀;
5)影像接收儀的數據存儲:該階段是影像接收儀把來自膠囊的影像數據存儲其內部的存儲模塊中,一般可以是SD卡、CF卡或U盤等。上述五個步驟是一個不斷循環的過程,期間除非用戶在體外控制膠囊進入休眠狀態或者膠囊被患者排出體外,否則將一直進行下去[6];
6)影像數據上載到工作站:該階段是影像接收儀把檢查過程中存儲的每一幀影像數據及其每幀影像對應的定位數據通過高速數據接口傳輸至影像與報告處理工作站;
7)影像的瀏覽與處理:該階段是診斷醫師通過工作站內的影像與報告處理軟件系統實現對采集的患者消化道影像進行各種靜態或動態方式的瀏覽,以及針對感興趣的影像進行相應的處理、測量或者加注標記和注釋等。這一階段的目的是輔助診斷醫師能高效地從海量的影像中發現感興趣的影像,并可通過該軟件提供的各種影像處理功能對感興趣的影像進行相關的處理,使患者影像中包含的病灶點能更清晰地顯示出來,輔助醫師做出快速、準確的判斷;
8)影像報告的生成和打印:該步驟是通過工作站內提供的影像與報告處理軟件系統完成。當醫師完成對一個患者消化道影像的瀏覽與處理后,需根據觀察結果生成規范的影像報告,并把影像報告打印輸出和保存;
9)影像的存儲與管理:對一個患者診斷完畢,其影像數據是不能被隨意刪除的,這些影像數據的完整保留,對科研、教學和解決未來可能的法律糾紛是最好的保障。因此所有影像數據需要被高效的存儲和管理,這也是醫院數字化影像發展的基礎以及醫學影像信息無片化和網絡化管理的基礎。該步驟也是通過工作站內提供的影像與報告處理軟件系統完成的。
3 核心功能闡述

膠囊本體尺寸大小為10mm×22mm左右,主控芯片采用流片設計,它需要集成微處理器、無線射頻收發機、圖像數據處理、電源管理等功能,與CMOS圖像傳感器配合,即可實現雙向可控式圖像采集裝置的圖像采集、傳輸、控制等功能。芯片具有集成度高、功耗低、需要外圍器件少等特點[7]。
芯片內部集成一個極低功耗的微處理器,以實現各種控制和數據調度功能。內部集成一個JPEG-LS圖像數據壓縮模塊,可將圖像傳感器采集到的圖像數據進行無損/準無損壓縮,在膠囊內窺鏡特定的工作環境下,可提供大約1/3的壓縮比,極好地提高了系統數據傳輸效率。采用半雙工、非對稱碼率的無線收發機制。發射機工作頻率在UHF頻段,支持8個獨立通信頻道。同時,內部集成3個線性穩壓調節器和1個開關電容式的升壓調節器,為芯片內部各個功能模塊,以及外接的圖像傳感器和圖像傳感器閃光燈提供穩壓電源。高效的電源管理電路有效的提高了系統的能量效率。圖2為膠囊結構及主控芯片功能介紹[8]。
膠囊在人體內行走1英寸需要2分鐘時間,膠囊本體采用無線供電技術,供電功率為80mW,膠囊行進過程中圖像傳感器3600旋轉,每秒拍攝30張圖像。圖像傳感器每2秒旋轉600,每12秒旋轉一周。采集的圖像通過無線傳輸到患者背心上,并保存到標準SD卡上。檢查全程需拍攝87萬張圖片,將SD卡插入電腦用軟件將數千張重復的圖像編輯成腸道的平面圖,可以將每一張圖像放大75倍,已便讓醫師觀察患處。
4 結論
從實際檢查效果來看解決了傳統膠囊內窺鏡漏拍的機率,采用無線供電技術拍攝時長不再受限,拍攝畫面的質量有了保障,閱片軟件可以進行圖像合成處理,圖像可放大至75倍,節省了醫師閱片強度,提高了閱片質量。
參考文獻:
[1]王志華,謝翔,張春.雙向數字式無線內窺鏡系統:中國,ZL03109810[P].2003.
[2]顏國正,姜萍萍.全消化道吞服式遙測膠囊體外電磁勵磁式定位系統:中國,ZL200410093139.1[P].2004.
[3]付國強,梅濤,孔德義,等.無線微型機器人腸道內窺鏡系統中圖像采集與無線傳輸子系統的設計[J].光學精密工程,2002,10(6):614-618.
[4]簡小云,梅濤,汪小華.膠囊內窺鏡機器人的外磁場驅動方法[J].機器人,2005,27(4):367-372.
[5]內山昭夫,河野宏尚,橫井武司,等.膠囊型醫療裝置系統、以及膠囊型醫療裝置:中國, 200480032945.6[P].2004.
[6]曾昭瑞,劉修泉,張煒,等.體內膠囊內窺鏡磁場定位檢測系統的研究和設計[J].微計算機信息,2008,24(20):238-240.
[7]王坤東,顏國正,姜萍萍,等.一種新的人體腔道介入器件定位方法[J].北京生物醫學工程,2006,25(4):392-394.
[8]張興,方亮,李國麗,等.無線內窺鏡中圓柱永磁體建模與仿真[J].系統仿真學報,2007,19(3):494-496,523.
本文來源于《電子產品世界》2017年第7期第59頁,歡迎您寫論文時引用,并注明出處。



評論