基于Cortex-M3的齒輪傳動軸損傷動態監測系統的設計與實現

傳統的齒輪傳動軸監測與診斷系統一般是將用于分析和監測的加速度等傳感器安裝在齒輪箱的軸承座上,采用廣域信號進行診斷與分析。如果僅是簡單將現有傳感器安裝在大功率小體積的重要裝備齒輪箱中,不僅加速度、溫度和應變等傳感器安裝困難,而且所測信號很難向外傳輸。因此,無法實時獲取齒輪和軸承實際工況條件下的真實動態應力和扭矩等重要信息,一些關鍵設備的齒輪傳動軸的實時動態監測就無法有效實現。
本文為解決上述問題,創新性地提出了“局域強信號”新概念,將傳感器直接安裝在所需檢測和監測的位置[1],感知局域強信號的變化。由于局域強信號距離信號發生源近,感知的信號強度遠高于其他位置測取的信號,故信號可靠度與可信度高,從而大幅度提高齒輪傳動系統損傷動態監測與判斷的成功率。突破了傳統廣域信號在箱體外采集信號與數據傳輸的局限性,實現了監測“零距離”局域強信號從箱體內部向箱體外部的高速和低誤碼率的傳輸,具有鮮明的“零距離接觸”特色,是本系統的重要創新點。
1 損傷動態監測系統的工作原理
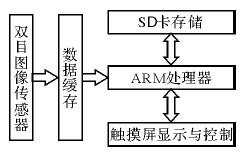
本系統由數據采集端和數據接收端兩部分構成。數據采集端以LPC1768微控制器為控制核心,包括前端數據采集電路、信號調理電路(放大和濾波)、RF發射模塊和電源電路。數據接收端包括LPC1768微處理器、數據存儲電路、RF接收模塊和電源電路。系統總體結構如圖1所示。
本系統采用無線RF方式傳輸數據。在數據采集端,首先由前端數據采集電路測得與扭矩成正比的電壓信號,經信號調理電路處理后送入LPC1768微控制器進行A/D變換,最后通過RF發射模塊將經過MSK調制過后的數字信號通過天線發射出去。在數據接收端,通過LPC1768微控制器的控制,將RF接收模塊接收到的數據通過USB接口實時傳入PC機進行數據分析,同時將接收數據存入外部存儲器。
2 系統的硬件設計
采用NXP公司的基于第二代ARM Cortex-M3內核的微控制器LPC1768作為系統的核心單元。通過LPC1768內部ADC(轉換頻率高達1 MHz),實現4路扭矩信號的采樣,精度達到12 bit,采樣頻率達到4 kHz。LPC1768通過控制CC1101實現數據收發,控制NAND Flash實現數據存儲,控制內部USB設備控制器實現與PC之間的數據傳輸,從而實現系統的基本功能,同時保證了系統在體積、功耗、性能上的最優化。
2.1 前端數據采集電路
數據采集電路由應變元件和橋電路兩部分組成。采用精度很高的應變元件制成的復雜傳感器來測量形變,應變元件被放置在需要測量的基體之上,當基體受力發生應力變化時,應變元件會隨基體變化發生相應的物理形變,該形變會導致應變元件的阻值發生相應變化。通過惠斯通橋電路將應變元件阻值的變化轉換成電壓的變化。由于應變片粘貼過后會存在阻值上的偏差,并且另外3個橋臂電阻阻值存在誤差,故惠斯通橋電路在測量開始前很難保證精確平衡,本系統在橋電路中加入數字電位器,通過程序控制,保證電橋在測量開始前零點精確平衡并且在測量過程中不出現零漂。前端采集電路如圖2所示。
2.2 信號調理電路
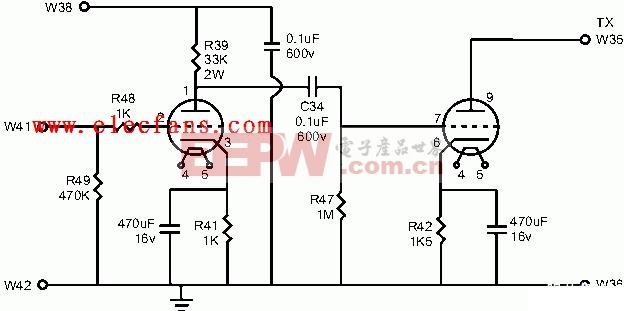
經由橋電路采集輸出的信號具有較小的差模信號(幾毫伏)和較大的共模信號(幾伏),需要放大電路具有很高的共模抑制比、高增益、低噪聲和高輸入阻抗[2]。本系統采用ADI公司的AD8221儀表放大器來放大橋電路的輸出信號。AD8221是一款增益可編程的高性能儀表放大器,低電壓失調、低失調漂移、低增益漂移、高增益精度和高共模抑制比特性,使AD8221成為橋式信號調理的絕佳選擇。AD8221采用±5 V供電,通過一只外部電阻設置增益(1~1 000),參考電壓VREF由雙通道Rail-to-Rail放大器AD8032精確提供。圖3中電容C318起到旁路電壓噪聲、提高電路的抗干擾性能作用。通過增益和VERF的調節,可將AD8221的輸出電壓控制在0~3.3 V之間,滿足ADC輸入電壓范圍。圖中輸出端的電阻R504、R508和電容C504、C510組成RC濾波電路,可濾除高頻干擾信號。
2.3 RF發射和接收模塊
CC1101是Chipcon公司一款高性價比單片UHF收發器,為低功耗無線電應用而設計。具有體積小、接收靈敏度高、傳輸速度快、工作電壓范圍寬、功耗低及輸出功率高等特點,同時擁有卓越的數據包處理能力、自動的前向糾錯、CRC校驗、交織以及白化等功能[3]。
RF電路對電源噪聲干擾十分敏感,尤其是高次諧波和電壓毛刺,當干擾嚴重時可導致 RF器件無法正常工作。因此,本系統對RF收發電路單獨制版,并用金屬罩對其進行電磁屏蔽,同時電源部分加上耦合電路,以保證RF收發模塊可靠工作。RF發射和接收模塊如圖4所示。CC1101與LPC1768之間的通信采用SPI總線接口實現,CSN(片選)、SCLK(串行時鐘)、SO(串行輸出)、SI(串行輸入)分別與LPC1768的P0.6、P0.7、P0.8和P0.9引腳相連。LPC1768作為主機,CC1101作為從機掛接在SPI總線上,LPC1768通過SPI接口對CC1101進行配置和數據交互。另外,GDO0引腳與LPC1768的P0.4引腳相連,用于指示是否已完整地接收或發送了一個數據包,它可作為LPC1768的外部中斷源信號。C607、C608、C609、L600和L601組成了一個非平衡變壓器,用于在差分信號和單端RF信號之間進行電平轉換,C613、C615、C616、L602和L603組成了一個LC濾波器,它與非平衡變壓器一起實現與50 Ω的天線相匹。
2.4 數據存儲和傳輸
本系統的數據存儲模塊設計選用三星公司的K9NBG08U5A NandFlash芯片實現。容量為2 GB,讀寫速度極快;I/O引腳為地址、數據、命令總線復用;內部為每一頁留有多余字節空間,可用作ECC校驗數據的存放[4]。
由于USB具有熱插拔、傳輸速度快和攜帶方便等優點,非常適合用于嵌入式系統中。本系統采用LPC1768內嵌的USB2.0全速設備控制器,以DMA方式實現和PC機之間數據的傳輸。
3 系統的軟件設計
系統軟件采用模塊化設計,根據不同的功能模塊設計相應的軟件,這樣系統有很好的裁剪性。每個模塊軟件驅動分為底層驅動和接口應用,整個下位機軟件采用前后臺系統實現[5]。
3.1數據采集端軟件設計
數據采集端軟件主要實現扭矩采集,通信時需注意A/D采樣速率和CC1101發送速率的匹配。CC1101以包為單位收發數據,當TX FIFO中裝滿64 bit的數據后,CC1101將自動對數據進行打包并發送,經實驗測得本系統CC1101完成一次數據發送需近2 ms的時間,所以要求在2 ms時間內將A/D采集的數據存入CC1101的TX FIFO中,以便實時發送。通過定時器每隔0.25 ms產生一次中斷(從而實現4 kHz的采樣頻率),相關中斷服務程序會調用A/D采樣函數進行4路通道采樣,因為每一路模擬信號被量化為12 bit,所以用2 B存儲一路的采樣結果,則每2 ms獲得64 bit(正好是CC1101的TX FIFO大小)數據送入CC1101的TX FIFO進行發送,從而實現了A/D采樣速率和CC1101發送速率的最佳匹配。數據采集端軟件流程如圖5所示。
3.2數據接收端軟件設計
設備與PC機的通信采用自定義的幀傳輸方式,命令幀通過LPC1768內部USB設備控制器的邏輯端點1進行傳輸,數據幀通過邏輯端點2進行傳輸。接收端每隔2 ms接收一次采集端傳來的64 B數據并將其存入外部存儲器中,如果接收到PC機發送來的數據讀取幀,則實時地將數據通過USB接口傳入PC機,如果接收到PC機發送來的讀取停止幀,則停止向PC傳數。數據接收端軟件流程如圖6所示。
4 測試結果與分析
使用本系統對某型汽車發動機的傳動軸在不同工況和轉速的條件下進行動態監測,測試結果如圖7、圖8所示。在工況1和工況2中,隨著發動機轉速增加,輸出扭矩增大,分別在3 500 r/m和3 000 r/m時達到最大,隨后輸出扭矩迅速減小,說明傳動軸在轉動過程中存在明顯的共振現象,需要對其結構進行改善。
本系統成功解決了某型汽車發動機傳動軸的扭振測試難題。實際測試結果證明該系統的設計思路和方法是成功的。本系統以關鍵傳動設備為研究對象,其方法、原理和技術可擴展到旋轉機械、往復機械等設備的故障預報,具有廣闊的應用前景。






評論