SAM4E單片機之旅——11、UART之PDC收發

使用PDC進行數據的收發能減少CPU的開銷。這次就使用PDC進行UART數據的接收與發送,同時,也利用TC也實現了PDC的接收超時。
本文引用地址:http://www.j9360.com/article/201703/345735.htmPDC是針對外設的DMA控制器。對比DMA控制器,它更為簡便,與相應外設的結合也更為緊密。比如說,要配置PDC時,首先要啟用相應的外設的時鐘;同時PDC收發的狀態是通過外設上的寄存器反映出來的;甚至中斷也是通過相應外設產生的。
使用PDC時,只需設置好傳輸時內存的地址,以及傳輸長度,就可以在外設和內存之前進行數據傳輸了。而SAM4的PDC甚至還提供了一個類似FIFO的功能:可以在進行本次傳輸的同時指定下次傳輸時的地址和長度,然后在本次傳輸結束時開始下一次傳輸。
一、 實現思路
本次會使用兩組緩沖區,分別用來數據的接收和發送。在接收數據完成后,就讓PDC把這個緩沖區的數據發送出去,并且使用另一個緩沖區進行數據接收。
使用PDC發送數據較為簡單,只需設置好需要發送的數據的地址和長度即可。
但是在使用PDC接收數據的時,如果未接收足夠指定數目的數據,是不會產生中斷的。在這里使用TC來進行PDC接收數據時的等待超時處理:
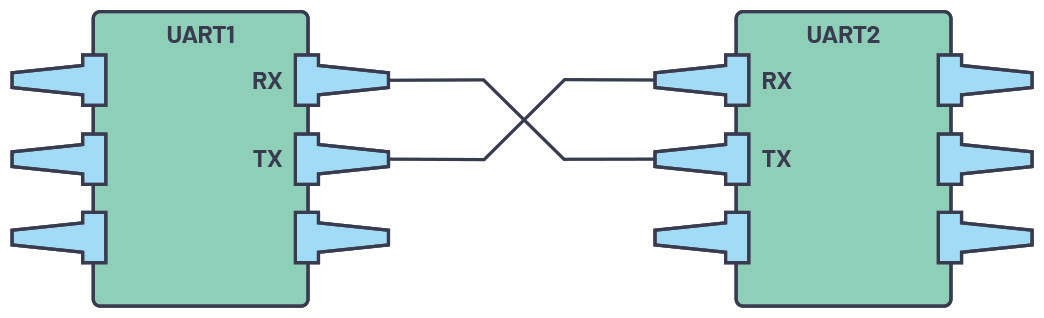
UART的引腳在沒有數據傳輸時,是一直保持在高電平狀態的。即只在有數據傳輸時,才會有電平的切換。而TC可以使用外部信號進行觸發以重置計數器。這樣一來,就可以讓UART在接收數據的同時,不斷對TC的計數器進行重置。而在沒有接收數據時,就會使得TC順利步進到一個特定的值,從而產生一個中斷。
二、 UART的PDC配置
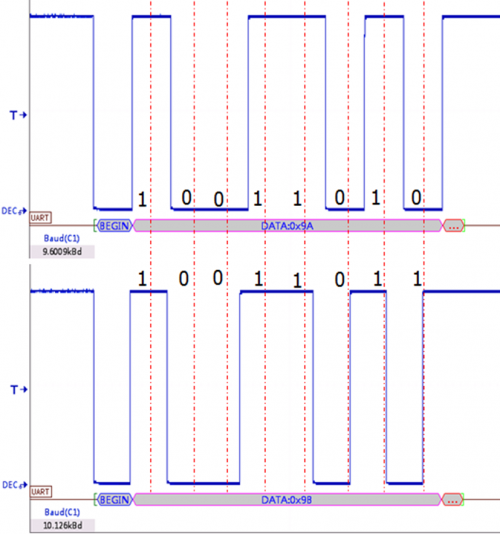
UART和MCK的基本配置保持不變:MCK為120 MHz,UART波特率為11520 Hz。
在配置PDC時,需要確保已經開啟了相應UART的時鐘,否則配置不生效。
緩沖區和PDC的配置。配置完成,且啟用UART的接收后,就可以進行數據的接收了。
/* 緩沖區 */
#define BUF_SIZE 8
uint8_t BUF1[BUF_SIZE];
uint8_t BUF2[BUF_SIZE];
uint8_t* RX_BUF;
/* 先設置好接收的BUF */
RX_BUF = BUF1;
PDC_UART0->PERIPH_RPR = RX_BUF;
PDC_UART0->PERIPH_RCR = BUF_SIZE;
/* 使能輸入輸出*/
PDC_UART0->PERIPH_PTCR = PERIPH_PTCR_RXTEN | PERIPH_PTCR_TXTEN;
中斷設置。PDC的中斷是通過相應外設產生的,所以這里需要對UART的中斷進行配置。
/* 啟用緩沖區滿中斷*/
UART0->UART_IER = UART_IER_RXBUFF;
/* 在NVIC中啟用中斷,將優先級設置為1*/
NVIC_DisableIRQ(UART0_IRQn);
NVIC_ClearPendingIRQ(UART0_IRQn);
NVIC_SetPriority(UART0_IRQn, 1);
NVIC_EnableIRQ(UART0_IRQn);
將接收緩沖區的數據通過PDC發送出去,并開始下一次數據的接收。
/* 參數size: 表示接收緩沖區中需要發送的數據的長度 */
void TransferRxBufAndRec(int size)
{
/* 等待發送完成 */
while(!(UART0->UART_SR & UART_SR_TXBUFE))
;
/* 通過PDC發送 */
PDC_UART0->PERIPH_TPR = RX_BUF;
PDC_UART0->PERIPH_TCR = size;
/* 使用另一個緩沖區繼續接收 */
RX_BUF = (RX_BUF == BUF1) ? BUF2 : BUF1;
PDC_UART0->PERIPH_RPR = RX_BUF;
PDC_UART0->PERIPH_RCR = BUF_SIZE;
}
UART的中斷處理函數。在中斷時,只需調用上面的函數,將接收緩沖區的內容重新發送出去即可。
void UART0_Handler(void)
{
/*判斷是否是由“接收緩沖區滿”引發的中斷 */
if (UART0->UART_SR & UART_SR_RXBUFF)
{
TransferRxBufAndRec(BUF_SIZE);
}
}
這樣配置完成后,刪除上一節中UART收發數據的代碼,即可完成數據的收發了。
三、 TC的配置
使用的通道為通道0:
#define gUseTc TC0->TC_CHANNEL[0]
使TC工作在波形輸出模式下,將TIOB引腳(PA1)用做外部事件引腳,短接它和UART0接收引腳,即短接PA1和PA9引腳。在配置完成后,若500ms內沒有數據接收,則強制開始數據的發送。
使能TC時鐘,及GPIO設置。
PMC->PMC_PCER0 = (1 << ID_TC0);
const uint32_t TIOB_PIN = PIO_PA1;
PIOA->PIO_PDR = TIOB_PIN;
PIOA->PIO_ABCDSR[0] |= TIOB_PIN;
PIOA->PIO_ABCDSR[1] &= ~TIOB_PIN;
TC模式設置。
利用TC的RC比較時產生的中斷進行超時提醒,TIOB引腳電平的下降沿TC的觸發。由于進行TC觸發時也會開啟時鐘,所以在RC比較時暫停時鐘。
由于超時時間可能較長,且精度要求不高,讓TC使用慢時鐘SLCK就可以了。
gUseTc.TC_CMR =
TC_CMR_WAVE /* 波形模式 */
| TC_CMR_TCCLKS_TIMER_CLOCK5 /* 時鐘5: SLCK */
| TC_CMR_WAVSEL_UP_RC /* 波形僅上升,且RC比較時觸發 */
| TC_CMR_CPCSTOP /* RC 比較時自動停止時鐘 */
| TC_CMR_EEVT_TIOB /* 設置為外部事件為TIOB */
| TC_CMR_EEVTEDG_FALLING /* 外部事件下降沿觸發 */
| TC_CMR_ENETRG /* 使能外部事件 */
;
RC設置,以及TC啟用。在RC比較后,計數器將暫停工作。在下次UART數據的接收時,TIOB引腳的信號會觸發TC以重新開始計數。
/* UART的PDC接收時等待超時時間 */
#define UART_RX_WAIT_MS 500
/* 設置RC */
const uint32_t rc_v = CHIP_FREQ_SLCK_RC * UART_RX_WAIT_MS / 1000;
gUseTc.TC_RC = TC_RC_RC(rc_v);
/* 使能TC時鐘,但不開始*/
gUseTc.TC_CCR = TC_CCR_CLKEN;
中斷設置。TC中斷的優先級比UART的要高。
/* RC 比較時產生中斷 */
gUseTc.TC_IER = TC_IER_CPCS;
/* NVIC , 優先級設置為0 */
NVIC_DisableIRQ(TC0_IRQn);
NVIC_ClearPendingIRQ(TC0_IRQn);
NVIC_SetPriority(TC0_IRQn, 0);
NVIC_EnableIRQ(TC0_IRQn);
中斷處理。中斷處理中過程中禁用PDC數據的接收,以免丟失數據。
void TC0_Handler(void)
{
uint32_t status = gUseTc.TC_SR;
/* 判斷中斷是否為RC比較觸發的 */
if (status & TC_SR_CPCS)
{
PDC_UART0->PERIPH_PTCR = PERIPH_PTCR_RXTDIS;
/* 計算PDC中接收到的數據的大小 */
const int rec_size = BUF_SIZE - (PDC_UART0->PERIPH_RCR);
if (rec_size != 0)
{
TransferRxBufAndRec(rec_size);
}
PDC_UART0->PERIPH_PTCR = PERIPH_PTCR_RXTEN;
}
}








評論