基于S7-400的污水處理自動控制系統的設計方案

1 引言
近年來我國集約化大規模現代化污水處理廠自動化程度要求越來越高,污水處理的自動化控制系統應具有全自動的邏輯控制,系統能夠長期安全無故障的運行,且具有很高的可靠性。本文介紹的污水處理自動控制系統運用siemens的s7-400系列、webaccess組態軟件和profibus-dp現場總線來構建一個分布式的自動控制系統,從而提高了污水處理的自動化程度和系統的高可靠性。
2 工藝流程
該水廠占地120多萬平方米,一期工程設計處理能力為8萬噸/天,二期工程完工后將達到12萬噸/天。鑒于水質的特點,該水廠采用的是奧貝爾氧化溝工藝。工藝流程如圖1所示。
首先來自城市污水管網的污水經過水廠的污水進水管道進入粗格柵,在粗格柵,比較大的懸浮物被攔截,以保護后續的動力設備。然后經提升泵提升,以提高水的重力勢能,從而使水可以依靠重力的作用流過后續各個構筑物。接著污水進入細格柵,在細格柵較小的懸浮物進一步被攔截。然后流入回旋沉砂池,進行砂水分離。然后污水進入二級處理階段:污水首先進入厭氧池配水井,在這里污水與活性污泥完成混合后被均勻的分配到兩座厭氧池中,污水會在這里流動大約6小時,并在厭氧池內高活性厭氧微生物的作用下,將廢水中的大分子、難降解的有機物降解為小分子、易降解的有機物(多為甲烷和乙酸),并將大部分的磷去除。緊接著污水進入下一構筑物--氧化溝,氧化溝是污水生化反應的主要階段。污水在這里流動大約9小時,這時大量的空氣被表曝機曝入水體,在高活性好氧微生物的作用下,污水中幾乎所有的有機物得到進一步降解,絕大多數有機物被分解完畢。其中污水中的氮也主要是在這個階段被除去。接下來污水和部分活性污泥一起流入綜合井,通過綜合井被均勻的分配到四個二沉池中。在二沉池中處理好的污水和活性污泥分離,活性污泥達到一定濃度后一部分被泵送到生物反應池前端和流入的污水再次混合。另外一部分送入儲泥池,為防止磷二次釋放,仍要對污泥進行二次曝氣,然后送到脫水間脫水,脫水后送出廠外掩埋。而沉淀好的清水則流入加氯接觸池進行深度處理以滿足水體受納標準,最后排放出去。
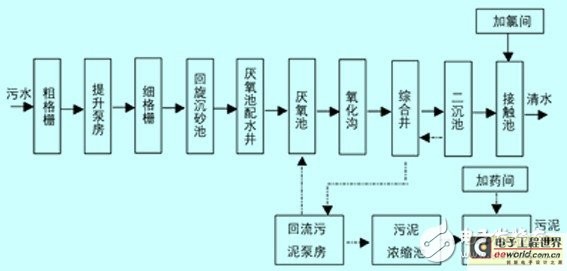
圖1:工藝流程
3 控制系統設計
3.1 系統網絡結構
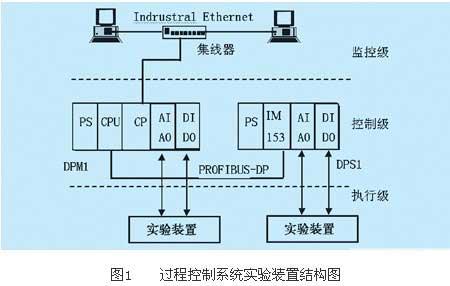
本系統根據該污水廠工藝要求和設計要求,考慮到系統的可靠性、開放性、易維護性和可擴展性,按“集中管理,分散控制”的原則,采用了分布式結構。該水廠的自動控制系統由中央控制室、各分布plc控制站和現場儀表及電控柜構成三級監控網絡。系統結構如圖2所示。
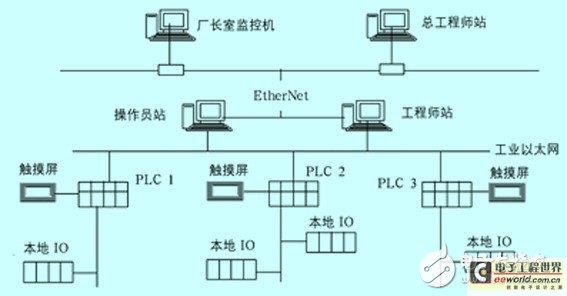
圖2:系統結構框圖
2 監控系統網絡結構
控制系統共2臺監控計算機,其中一臺備用。還有3個plc控制主站。通過現場總線將控制主站和中央控制室的上位工程師站相連接,便于監控。并將上位工程師站、操作員站、總工程師站與廠長室的計算機接入以太網,由管理機完成各項管理功能。這樣整個自動化監控系統便構成了scada遠程監控系統,從而實現了數據采集、處理、監視及對現場設備進行控制等功能。
3.2 控制方式
該系統中主要工藝設備采用三種控制模式,即就地手動控制、遠程plc控制和自動控制。現場的泵類、表曝機和設備開啟關閉等開關信號、各構筑物模擬信號(如do、t-p、ph、tss、等)全部經過plc在上位機上顯示。現場各監控點的物理參數,均通過profibus總線與plc主站相連。
3.3 系統功能設計
(1)上位機監控系統的功能。上位機采用了兩臺研華工業控制計算機,通過工業以太網與現場的plc主站相連。上位機操作系統采用的是windows xp,監控軟件采用的是webaccess.上位機的主要功能是對污水處理廠的數據進行采集;對自動控制系統的參數進行設置;完成控制系統的組態,同時可以進行在線、離線編程及設定參數的修改;通過顯示的控制過程畫面和實時的數據來監控生產過程;能對歷史數據進行統計分析和儲存并且能夠完成報表打印。另外在工廠局域網內接入了inte-rnet,從而實現了局域網、本地網、遠程網的跨區域遠程現場設備監控功能。這樣管理者可以隨時隨地的通過各種上網方式獲得水廠的信息,將范圍擴展到了工廠監控級,實現了上層信息網和控制網相結合。
(2) 單元控制站。根據工藝的要求,全廠共設有3個單元控制站,分別為plc1站、plc2站和plc3站。單元控制站選用simatic s7-400系列的plc.cpu選用了cpu414-3dp,該cpu具有中等性能,適用于對程序規模、指令處理速度及通訊要求較高的場合。它帶有一個mpi/dp接口,一個dp接口,還有一個profinet接口,同時為dp接口和profinet接口分配的分布式i/o點地址分別為8kb.單元控制站在現場進行參數檢測,設備運行信號的采集、檢測和控制,并可通過該站的人機界面對設備進行操作,同時向上位機系統實時傳送數據。上位機系統設定的控制參數通過光纖以太網傳送給單元控制站,然后由單元控制站完成對現場設備的控制。單元控制站也對自身模板進行監控,其診斷系統連續監測系統和過程的功能,記錄錯誤和特定系統事件。如果出現診斷報文事件,那么模板將會觸發一個診斷中斷,此后單元控制站中斷用戶程序的執行,執行相應的診斷中斷模塊。
4 單元控制站設計
4.1 plc1站
plc1站主要負責粗格柵、進水泵房、細格柵和旋流沉砂池等設備的數據采集、現場控制柜以及電動閘門的開啟。本站主要配備1塊cpu414-3dp模塊、2塊ps407 10a電源模塊、1塊cp 443-1通訊處理器、2塊im 460-0接口模塊、5個16路di模塊、3個16路do模塊、5個8路ai模塊、1個8路ao模塊和一個擴展機架。本站對粗格柵、細格柵的控制采用液位差和時間控制。即當格柵前后液位差大于設定值后啟動格柵機,或者當距離上次格柵運行的時間大于設定值時也要啟動格柵機。這兩種控制方式中液位差控制的優先級比時間控制的優先級高。格柵機的控制流程圖,如圖3所示。
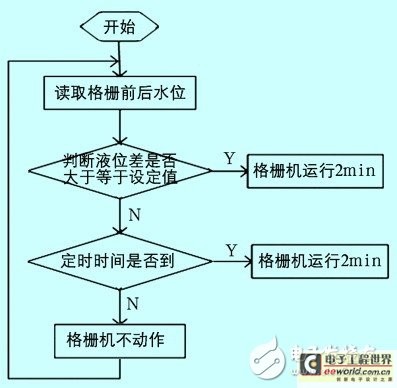
圖3:格柵機的控制流程圖
對提升泵的控制是根據液位的高低決定泵的啟停,其控制流程圖如圖4所示。



評論