基于CAN總線的模塊化獨立光伏發電控制系統

引言
隨著能源日益緊缺和環保壓力不斷增大,光伏發電技術以其資源豐富、清潔環保、受地域限制小等優點,越來越受到人們的重視。根據對現有光伏發電系統的調查分析,儲能蓄電池的使用壽命是導致系統故障和失效的重要因素之一。傳統的獨立光伏發電系統一般采用單個充電控制器控制太陽能電池板對蓄電池進行充電。該方法基本能夠滿足小容量蓄電池的要求,但不能勝任大容量蓄電池或蓄電池組。大容量的蓄電池或蓄電池組充電時需要的充電電流較大,充電過程中充電控制器投入/切出充電頻繁,對蓄電池沖擊較大,易損壞蓄電池。當前,大容量蓄電池和蓄電池組正被逐漸廣泛使用,因此,需要更加有效、可靠的充電控制方案。CAN總線有組態靈活、結構簡單、可靠性高、通信速度快等特點,可以被用來設計一種新型模塊化獨立光伏發電控制系統。多個充電模塊在管理模塊的控制下調整充電PWM的占空比,減小對蓄電池的沖擊,有效保護蓄電池,且通過增減充電模塊數目,可適應不同容量的蓄電池,有利于擴容。
1 模塊化光伏發電系統結構
基于CAN總線的模塊化光伏發電控制系統由上位機PC、管理模塊、n個充電模塊(1≤n≤10)組成。每個充電模塊控制單塊太陽能電池板對蓄電池進行充電。系統結構如圖1所示。
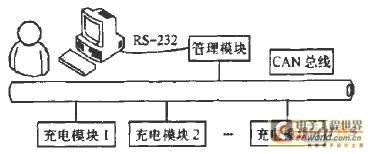
圖1 模塊化光伏發電控制系統結構
1.1管理模塊
管理模塊集成了矩陣鍵盤單元、顯示單元、數據存儲單元、采樣單元、CAN通信單元以及串口通信單元。管理模塊的系統結構如圖2所示。
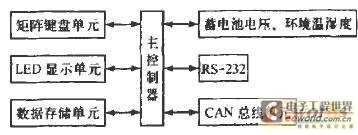
圖2 管理模塊系統結構
通過人機接口(矩陣鍵盤單元、顯示單元),顯示各充電模塊工作狀態的實時信息,如日發電量、光電池電壓、充電電流等;且用戶可方便地設置和保存充電控制參數,如浮充電壓、均衡電壓、溫度補償系數等。管理模塊采集蓄電池電壓信號經過信號調理、A/D轉換送至CPU,軟件程序根據蓄電池狀態控制充電模塊進行充電,并通過CAN總線發送充電控制命令給各充電模塊。
1.2充電模塊
充電模塊內置采樣單元,采集對應連接的太陽能電池板的電壓及充電電流;PWM充電單元產生PWM波形對充電進行控制。充電模塊的系統結構如圖3所示。
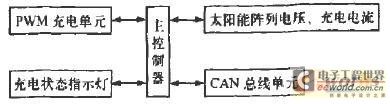
圖3 充電模塊系統結構
根據管理模塊發送的命令,充電模塊實時調整充電PwM;同時,每隔1s將自身的充電狀態信息上報管理模塊。
2 CAN通信協議設計
CAN總線,即控制器局域網,與RS_485等總線相比,CAN總線支持多主工作方式,節點間不分主、從,組網簡單,且CAN的信號傳輸采用短幀結構,信息傳輸速度快,通信距離最遠可達10km(通信速率最高為5 kb/s),通信速率最高可達1 Mb/s(通信距離最遠為40 m),實時性好。由于采用了非破壞性總線仲裁技術,通過設置優先級來避免沖突,故可靠性高。

評論