uCOS-II的嵌入式串口通信模塊設計

1 uCOS-II的中斷處理及51系列單片機中斷系統分析
uCOS-II中斷服務程序(ISR)一般用匯編語言編寫。以下是中斷服務程序的步驟。
- 保存全部CPU寄存器;調用OSIntEnter()或OSIntNesting(全局變量)直接加1;
- 執行用戶代碼做中斷服務;
- 調用OSIntExit();
- 恢復所有CPU寄存器;
- 執行中斷返回指令。
uCOS-II提供兩個ISR與內核接口函數;OSIntEnter()和OSIntExit()。OSIntEnter()通知uCOS-II核,中斷服務程序開始了。事實上,此函數做的工作是把一個全局變量OSIntNesting加1,此中斷嵌套計數器可以確保所有中斷處理完成后再做任務調度。另一個接口函數OSIntExit()則通知內核,中斷服務已結束。根據相應情況,退回被中斷點(可能是一個任務或者是被嵌套的中斷服務程序)或由內核作任務調度。
用戶編寫的ISR必須被安裝到某一位置,以便中斷發生后,CPU根據相應的中斷號運行準確的服務程序。許多實時操作系統都提供了安裝和卸載中斷服務程序的 API接口函數,但uCOS-II內核沒有提供類似的接口函數,需要用戶在對CPU的移植中自己實現。這些接口函數與具體的硬件環境有關,接下來以51單片機下的中斷處理對此詳細說明。
51單片機的中斷基本過程如下:CPU在每個機器周期的S5P2時刻采樣中斷標志,而在下一指令周期將對采樣的中斷進行查詢。如果有中斷請求,則按照優先級高低的原則進行處理。響應中斷時,先置相應的優先級激活觸發器于相應位,封鎖同級或低級中斷,然后根據中斷源類別,在硬件控制下,將中斷地址壓入堆棧,并轉向相應的中斷向量入口單元。通常在入口單元處放一跳轉指令,轉向執行中斷服務程序.當執行中斷返回指令RETI時,把響應中斷時所置位的優先級激活觸發器清零后,從堆棧中彈出被保護的斷點地址,裝入程序計數器PC,CPU返回原來被中斷處繼續執行程序。
在移植的過程中,采用Keil C51作為編譯環境。Keil C5l集成C編譯和匯編器。中斷子程序用匯編語言編寫,放到移植uCOS-II后的OS_CPU_A.ASM匯編文件中。下面是以串行口中斷為例的移植中斷服務子程序代碼。
CSEGAT0023H ;串口中斷響應入口地址
LJMPSerialISR;轉移到串口中斷子程序入口地址
RSEG?PR?SeriallSR?OS_CPU_A
SerialISR:
USINGO
CLR EA ;先關中斷,以防中斷嵌套
PUSHALL ;已定義的壓棧宏,用于將
;CPU寄存器的值壓入堆棧
LCALL_?OSIntEnter ;監視中斷嵌套
LCALL_?Serial ;串口中斷服務程序
LCALL_?OSintExlt
SETBEA
POPALL;已定義的出棧宏,將CPU寄存器的值出棧
RETI
2 串口驅動程序
筆者已在5l單片機上成功移植了uCOS-II內核,移植過程在此不再討論。這里重點分析uC0S—II內核下串口驅動程序編寫。
由于串行設備存在外設處理速度和CPU速度不匹配的問題,所以需要一個緩沖區.向串口發送數據時,只要把數據寫到緩沖區中,然后由串口逐個取出往外發。從串口接收數據時,往往等收到若干個字節后才需要CPU進行處理,所以這些預收的數據可以先存于緩沖區中。實際上,單片機的異步串口中只有兩個相互獨立、地址相同的接收、發送緩沖寄存器SBUF。在實際應用中,需要從內存中開辟兩個緩沖區,分別為接收緩沖區和發送緩沖區。這里把緩沖區定義為環形隊列的數據結構。
uCOS-II內核提供了信號量作為通信和同步的機制,引入數據接收信號量、數據發送信號量分別對緩沖區兩端的操作進行同步。串口的操作模式如下:用戶任務想寫,但緩沖區滿時,在信號量上睡眠,讓CPU運行別的任務,待ISR從緩沖區讀走數據后喚醒此睡眠的任務;同樣,用戶任務想讀,但緩沖區空時,也可以在信號量上睡眠,待外部設備有數據來了再喚醒。由于uCOS-II的信號量提供了超時等待機制,串口當然也具有超時讀寫能力。
圖1是帶緩沖區和信號量的串口接收示意圖。數據接收信號量初始化為0,表示在環形緩沖區中無數據。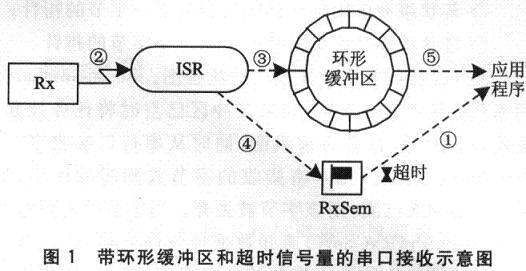
接收中斷到來后,ISR從UART的接收緩沖器SBUF中讀入接收的字節(②),放入接收緩沖區(③),然后通過接收信號量喚醒用戶任務端的讀操作(④、 ①)。在整個過程中,可以查詢記錄緩沖區中當前字節數的變量值,此變量表明接收緩沖區是否已滿。UART收到數據并觸發了接收中斷,但如果此時緩沖區是滿的,那么放棄收到的字符。緩沖區的大小應合理設置,降低數據丟失的可能性,又要避免存儲空間的浪費。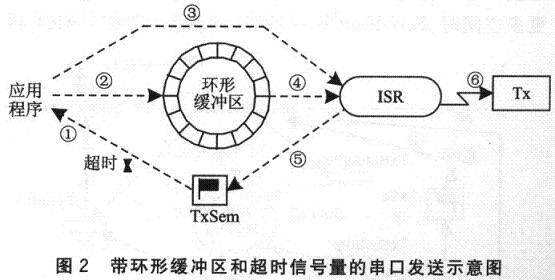
圖2為帶環形緩沖區和超時信號量的串口發送示意圖。發送信號量初始值設為發送緩沖區的大小,表示緩沖區已空,并且關閉發送中斷。發送數據時,用戶任務在信號量上等待(①)。如果發送緩沖區未滿,用戶任務向發送緩沖區中寫入數據(②)。如果寫入的是發送緩沖區中的第一個字節,則允許發送中斷(②)。然后,發送ISR從發送緩沖區中取出最早寫入的字節輸出至UART(④),這個操作又觸發了下一次的發送中斷,如此循環直到發送緩沖區中最后一個字節被取走,重新關閉發送中斷。在ISR向UART輸出的同時,給信號量發信號(⑤),發送任務據此信號量計數值來了解發送緩沖區中是否有空間。

評論