基于鐵路巡線的導航定位終端的設計

作者/ 張婷 姚金杰 高虹 中北大學 信息探測與處理技術重點實驗室(山西 太原 030051)
本文引用地址:http://www.j9360.com/article/201611/340857.htm摘要:衛星導航定位系統在不斷地發展和完善,而導航定位系統的重要核心是終端。本文設計了以單片機ATmega128A為處理器、以慣性器件MPU6050和FLASH存儲為核心的集成一體化的硬件接收機終端。應用GPS/北斗模塊接收GPS/北斗衛星信號進行定位,應用微慣性測量單元獲取終端姿態信息,并發送到單片機串口,經過處理存儲至FLASH存儲芯片。將該技術應用到鐵路巡線的導航定位終端中,鐵路巡視完成后,通過串口獲取數據,再通過短報文遠程發送至軟件監控平臺。經過測試,本系統能夠穩定地得到終端的定位巡視信息。
引言
目前,鐵路巡線仍存在作業難度大且管理不便,鐵路巡線工人是否履行職責關乎到鐵路運行安全。然而,鐵路巡線屬于室外作業,其工作情況很難考核,傳統工作簽到記錄方法容易被偽造,且歷史記錄不易保存,很難對鐵路巡道工的工作情況進行如實地考核和查證,在一定程度上會造成人員工作積極性和專業素質技能的下降。

針對上述問題,將衛星定位導航技術應用于鐵路巡線將極大地方便鐵路巡線的管理工作。本設計裝置能夠完成巡線人員和警犬的定位以及巡線軌跡存儲等功能,其中定位精度能夠達到1m,存儲深度達2GB。
1 衛星導航系統的組成
衛星導航系統主要有全球定位系統(GPS)和北斗衛星導航系統兩種,主要由空間衛星單元、地面控制單元和用戶接收單元組成。地面控制單元是由主控站、地面控制站和監測站組成。用戶接收單元為GPS或北斗定位終端。
北斗衛星導航系統是國產系統,采用三球交匯的測量原理,但實際上只用到了兩顆衛星,其基本原理是以這兩顆已知具體空間位置坐標的衛星為球心,以它們到用戶的距離為半徑畫球,再以地球的地心為球心,以用戶到地心的距離為半徑畫球,最后三個球必然相交于一點,這一點就是用戶的位置。

2 系統設計
本文以GPS系統為主設計,同時也兼顧北斗定位系統的應用。

2.1 硬件設計
2.1.1 高精度GPS模塊

接收衛星導航信號時,選用高精度GPS定位模塊u-blox NEO-M8N,能夠同時獲取和跟蹤不同的全球導航衛星(GNSS)系統并行接收GPS和GLONASS或北斗信號。適應于即使在GPS信號差的環境下都需要最高的可用性和準確性的高性能應用。由于 GPS/SBAS操作在晴空郊外條件下就可達到最佳定位,另外還配備了內置的智能自動切換功能,可根據GNSS衛星的可見性和可靠性,自動切換到單一GNSS操作模式。
該接收模塊功耗低、重量輕、定位速度快,具有GNSS引擎,支持GPS和北斗通信,具有功耗低、導航精度高、費用低、支持并行數據處理、體積小巧等特點。除此之外,NEO-M8系列提供了高靈敏度和低電壓供應下的最小反應時間,同時為價格敏感的應用做了優化,并且NEO-M8N也提供了更簡單的RF射頻集成,便于使用。

2.1.2 硬件模塊的設計
方案中采用Atmel公司型號為ATmega128a的8位MCU,擁有128KB的系統內可編程Flash的RISC結構,可通過ISP實現系統內編程。
定位終端是整個系統的硬件基礎,應具備以下功能:
(1)定位功能
鐵路巡線工人工作的時候將該導航定位終端攜帶在身上,待完成工作之后,將獲取的數據讀出即可反映出巡邏的路線,這就要求雙模定位終端能夠接收到GPS和北斗的雙模定位信息。

(2)FLASH存儲功能
目標手持多模定位終端可通過FLASH存儲芯片將巡線過程中接收到的定位信息保存,待鐵路巡線結束后,將數據回傳至上位機,然后通過短報文發送給中心監測平臺。
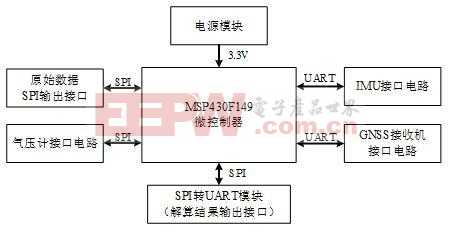
按照定位終端的需求,本系統主要分為三大模塊,即北斗慣組定位模塊、MCU控制模塊和FLASH存儲模塊,其總體工作框圖如圖2所示。
MCU控制模塊是整個硬件系統的核心部分,主要負責完成以下工作:
(1)讀取衛星導航所定位的位置信息,并將其有用的信息進行提取;
(2)對提取的信息進行相關的數據處理,將處理后的數據傳送到FALSH模塊上存儲。
GPS模塊實現衛星導航數據的接收,在Vcc供給電壓端和芯片接地端用到了兩個直流板上型電感L1、L2,主要目的是為了抑制電磁干擾。
慣組電路模塊實現了其在信號不佳或沒有信號情況下的定位或導航。
本設計采用的是MT29F16G08ABABAWPITB系列FLASH存儲器,直接連接到AVR的MCU上,主要用來存放GPS/北斗芯片接收到的定位數據。
考慮到裝置的工作環境需要電源電壓穩定與可靠,本設計采用穩壓NCV1117DT50T5G系列芯片,這是低壓差正電壓穩壓器,具有較高精度,能夠提供一個超過1.0A的輸出電流。具有內部保護特點,包括輸出電流限制,安全工作區補償并支持熱關。該系列也具有很好的通用性,且使用范圍非常廣泛。

2.2 軟件設計
本系統的軟件設計主要是北斗數據采集處理。首先北斗定位模塊開始工作,接收到位置信息,然后對接收到的信息進行數據處理,最后只輸出經緯度等系統所需要的信息,將處理后的數據傳輸給MCU控制模塊。MCU將收到的經緯度等信息傳輸給存儲模塊。
從定位模塊所接收到的NMEA語句信息中提取經度、緯度等數據。本終端所用定位芯片可接收許多格式的語句,由NMEA0183協議可以看出,RMC格式的語句是包含完整的數據信息的、數據量最小的定位信息。因此,在該設計中,選擇$GNRMC語句來提供雙模定位信息,$GNRMC語句的字段表示為:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*<13>
其中,<3>,<4>,<5>,<6>代表了系統所需要的經緯度信息,因此,在數據處理中就是要提取出這四個字段的內容。
要使雙模定位模塊只輸出$GNRMC語句,需要對其進行數據處理,本設計采用數組的方式來存儲數據,首先判斷串口收到的數據格式是否為$GNRMC,若不是$GNRMC,則接收的數據錯誤;若是$GNRMC,則接受的數據正確。接收到$GNRMC時,開始存儲定位所要的數據,$GNRMC字段是以“,”分隔的,判斷定位是否有效,是看第二個“,”后收到的數據,若是“A”,則定位有效,開始接收之后的經緯度等數據;若是“N”,則定位無效,重新接收數據。將接收到的有用信息提取并保存到數組中,最后接收到“*”終止符時,說明本次數據接收完畢。北斗/GPS雙模定位模塊的數據處理基本流程圖如圖8所示。

3 接收測試
驗證接收終端模塊時,主要完成的任務是獲取目標的位置信息,如圖9所示。定位測試后就要對活動軌跡的顯示進行測試,可以使監控人員更直觀地了解目標的動態,需要在地圖上實時地顯示目標所走過的軌跡,如圖10所示為監控目標的活動軌跡。從圖中可以很直觀地看到目標行走的軌跡,這便有利于監控人員掌握鐵路巡線員巡線狀態。

4 總結
本文采用GPS/北斗模塊和MCU設計了基于鐵路巡線的衛星導航定位終端,完成了鐵路巡線監測裝置的硬件電路設計,給出了此裝置中幾個重要的模塊電路原理圖,提供了定位終端軟件的基本流程,并對整體功能進行了測試。實驗表明,系統的性能穩定,基本實現了所設定的功能要求,具有一定的應用推廣前景。
參考文獻:
[1]耿大威.基于北斗_GPS雙模衛星定位系統的車載終端設計[D].青島:中國海洋大學,2013.
[2]陳粵初.單片機應用系統設計與實踐[M].北京:北京航空航天大學出版社,2003,28-33.
[3]徐龍芳.基于GPS和GPRS技術的多功能車載終端的硬件實現和關鍵技術研究[D].山東:山東大學,2011.
[4]白如玉,蘇新彥,遲殿玉.基于北斗搜尋救助定位系統的定位終端設計[J].科技創新與應用,2015(32):48-48.
[5]劉堯.基于北斗衛星定位信息接收與處理系統的實現[D].大連:大連海事大學,2012.
本文來源于中國科技期刊《電子產品世界》2016年第11期第48頁,歡迎您寫論文時引用,并注明出處。









評論