ST1101紅外光電傳感器的電動自行車速度與里程表設計

系統概述
本系統由信號預處理電路、單片機AT89C2051、系統化LED顯示模塊、串口數據存儲電路和系統軟件組成。其中信號預處理電路包含信號放大、波形變換和波形整形。對待測信號進行放大的目的是降低對待測信號的幅度要求;波形變換和波形 , 整形電路則用來將放大的信號轉換成可與單片機相連的TTL信號;通過單片機的設置可使內部定時器T1對脈沖輸入引腳T0進行控制,這樣能精確地算出加到T0引腳的單位時間內檢測到的脈沖數;設計中速度顯示采用LED模塊,通過速度換算得來的里程數采用I2C總線并通過E2PROM來存儲,既節省了所需單片機的口線和外圍器件,同時也簡化了顯示部分的軟件編程。系統的原理框圖如圖1所示。

圖1 系統的原理框圖
工作原理
該設計能實時地將所測的速度與累計里程數顯示出來,主要是將傳感器輸入到單片機的脈沖信號的頻率(傳感器將不同車速轉變成不同頻率的脈沖信號)實時地測量出來,考慮到信號的衰減、干擾等影響,在信號送入單片機前應對其進行放大整形,然后通過單片機計算出速度和里程,再將所得的數據存儲到串口數據存儲器,并由LED顯示模塊交替顯示所測速度與里程。本設計的里程數的算法是一種大概的算法(假設在一定時間內自行車是勻速行進,平均速度與時間的乘積即為里程數)。
設計時,應綜合考慮測速精度和系統反應時間。本設計用測量脈沖頻率來計算速度,因而具有較高的測速精度。在計算里程時取了自行車的理想狀態。實際中,誤差控制在幾米之內,相對于整個里程來說不是很大。為了保證系統的實時性,系統的速度轉換模塊和顯示數據轉BCD碼模塊都采用快速算法。另外,還應盡量保證其他子模塊在編程時的通用性和高效性。本設計的速度和里程值采用6位顯示,并包含兩個小數位。
系統的硬件設計
1 脈沖發生源
脈沖發生源本設計采用了ST1101紅外光電傳感器,進行非接觸式檢測。當有物體擋在紅外光電發光二極管和高靈敏度的光電晶體管之間時,傳感器將會輸出一個低電平,而當沒有物體擋在中間時則輸出為高電平,從而形成一個脈沖。該系統在自行車后輪的軸處保持著與輪子旋轉切面平行的方向延伸附加一個鋁盤,在這個鋁盤的邊沿處挖出若干個圓形過孔,把傳感器的檢測部分放在圓孔的圓心位置。每當鋁盤隨著后輪旋轉的時候,傳感器將向外輸出若干個脈沖。把這些脈沖通過一系列的波形整形成單片機可以識別的TTL電平,即可算出輪子即時的轉速。鋁盤的圓孔的個數決定了測量的精度,個數越多,精度越高。這樣就可以在單位時間內盡可能多地得到脈沖數,從而避免了因為兩個過孔之間的距離過大,而車子正好在過孔之間或者是在下個過孔之前停止了,造成較大的誤差。
本設計在鋁盤過孔的設計上采用11個過孔,從而留下了10個同等的間距。這樣在以后的軟件設計中能夠較為方便的計算出速度里程。脈沖發生源的硬件結構圖如圖2所示。
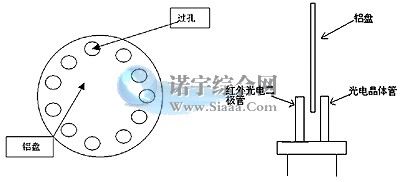
圖2 脈沖發生源硬件結構圖(左為正視圖,右為側視圖)
2 信號預處理電路
信號預處理電路如圖3所示,系統的信號預處理電路由二級電路構成,第一級是由開關三極管組成的零偏置放大器,采用開關三極管可以保證放大器具有良好的高頻響應。當輸入信號為零或負電壓時,三極管截止,電路輸出高電平;而當輸入信號為正電壓時,三極管導通,此時輸出電壓隨著輸入電壓的上升而下降,這使得速度里程表既可以測量任意方波信號的頻率,也可以測量正弦波信號的頻率。由于放大器的放大功能降低了對待測信號的幅度要求,因此,系統能對任意大于0.5V的正弦波和脈沖信號進行測量。預處理電路的第二級采用帶施密特觸發器的反相器DM74LS14來把放大器生成的單相脈沖轉換成與COMS電平相兼容的方波信號(如圖4所示),同時將輸出信號加到單片機的P3.4口上。

評論