分布式測量系統時統信號分路電路設計

摘要:針對分布式測量系統不同測量單元之間時間統一的問題,設計了一種實用的時統信號分路傳輸電路。詳細分析了電路的設計原理、元器件的選擇和電路的具體實現,并對實際電路進行了測試。實驗表明,設計的電路在實際運行中穩定可靠,具有較高的工程實用價值。
關鍵詞:分布式測量:時間統一;分路電路
在現代許多分布式測量系統,如激光陀螺形變測量系統、分布式聲源定位系統等高精度分布式測量系統中,為了精確地獲取信息,各個測量單元之間的測量時間必須是同步的,即需要考慮不同測量單元之間的時間統一。實現時間統一最直接的方法是將一個時統設備產生的標準時間傳輸給測量單元使用,因此需要設計一個電路來實現時統信號的多路傳輸。筆者針對分布式測量系統對時間統一的要求,設計了一個時統信號分路電路,可以將GPS數據或B碼終端輸出的信號分成多路,以滿足不同測量單元之間實現同步測量的需求。
1 分路電路設計方案
分布式測量系統一般是基于不同位置的測量單元敏感各自所在位置的信息,經過處理得出安裝點之間相關的信息。處于不同位置的測量單元單獨完成信息的采集,時統設備的信號經過分路電路分路后,對每個測量單元提供標準時間,將測量單元測得的數據打上時標,按照標準時間對數據進行處理分析,就可以實現精確地分布式測量。其中分路的實現是將GPS接收板輸出的兩路信號直接在電路上分為兩路,將信號進行處理后傳輸給測量單元使用。
在實際測量中,不同測量位置之間的距離往往較遠,可達到數百米。由于RS-232是單端信號傳輸,存在共地噪聲、不能抑制共模干擾和傳輸距離短等問題,因此需要進行電平轉換后傳輸信號。考慮到RS-422是差分傳輸,抗干擾能力強,在低于100 kB/s傳輸速率時,可以達到最大傳輸距離1 200 m,采用RS-422接口在不同測量單元之間傳輸時統信號,可以提高信號的傳輸距離、完整性和電磁兼容性,增強抗干擾能力。
時統信號分路電路的原理框圖如圖1所示。

由圖1可以看出,GPS接收板輸出的兩路信號首先在電路中分路,然后選擇合適的芯片進行電平轉換,傳輸給測量單元使用。當能接收到GPS信號時,分布式測量系統的時統信號直接由GPS接收板提供,其輸出包括1路PPS信號和1路GPS數據包。由于受外界環境和條件的影響,會出現不能接收到GPS信號的情況,因此需要考慮使用其它的時間統一信號進行分布式測量的時間統一,比較常見的是使用B碼進行測量單元的時間統一。其中GPS數據包采用的是RS-232電氣協議,PPS信號和B碼信號為TTL信號,均可進行電平轉換后以RS-422差分形式傳輸。
2 分路電路的實現
按照圖1所示的原理,對時統信號分路電路的器件進行選擇。RS-422接口轉換芯片選擇MAXIM公司的MAX488芯片,全雙工,含有接收和發送模塊。GPS接收模塊采用加拿大NovAtel公司生產的OEMV系列板,此處采用OEMV-1G。OEMV-1G需要兩個輸入電源,分別是接收板所需電源+3.3 V,天線增益所需電源+5 V。RS-422轉換芯片MAX488需電源+5 V。外部供應電源為+24~+30 V的直流電源,因而需要直流電源轉換芯片,轉換為+5 V供MAX488和GPS天線使用,再進一步轉換為+3.3 V供GPS接收板使用。此處選擇臺灣PowerGood公司生產的提供+5 V輸出的ESB2450系列芯片和美國Texas Instruments公司生產的提供+3_3 V輸出的產品REG1117芯片。設計的分路電路實物圖如圖2所示。

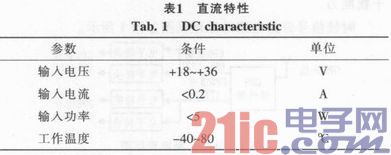
此電路的直流特性如表1所示。
3 實驗測試
實驗測試采用屏蔽線為安普六類屏蔽線,其阻抗為0.08 Ω/m,線數為8根。實驗采用線長為215 m的屏蔽線時,單端線阻為17 Ω。實驗中的電源是由測量單元通過屏蔽線接入時統設備的,當接入+24 V電源時,在時統設備中的GPS接收模塊不工作,測量PowerGood ESB2450芯片輸入端電壓為15.8 V,此時電源線上壓降約為8 V,輸入電壓不能滿足最低輸入電壓18 V的要求,電路不能工作,計算可得屏蔽線的壓降為40 mV/m,因而在供電電源+24 V時屏蔽線長度不超過180 m。此傳輸距離的限制不是由于數據傳輸速度造成的,而是因為受電源供電的影響,時統設備的電壓會受到傳輸電路壓降的限制,可以采用電氣特性更為優良的屏蔽線或者采用單獨給時統設備供電的方式提高傳輸距離。之后采用傳輸距離為150 m的屏蔽線進行測試。
實驗主要是利用示波器測試時統設備和測量單元之間的延遲,以及測量單元之間的時間同步性。使用的示波器型號為Tektronix的TDS10 12B,示波器的采樣時間分辨率為1 ns。測試的主要內容是:
GPS信號的同步性:時統設備接收的GPS接收模塊發出的GPS信號與測量單元接收的GPS信號。
PPS信號的同步性:時統設備接收的GPS接收模塊發出的PPS信號與測量單元接收的PPS信號。
實驗測試波形如圖3和圖4所示。圖3中通道1和通道2為GPS信號在時統設備和測量單元處的波形,圖4中通道1和通道2為為PPS信號在時統設備和測量單元處的波形。對它們進行多次測量的結果如表2所示。其中A代表時統設備,B、C分別代表不同的測量單元。
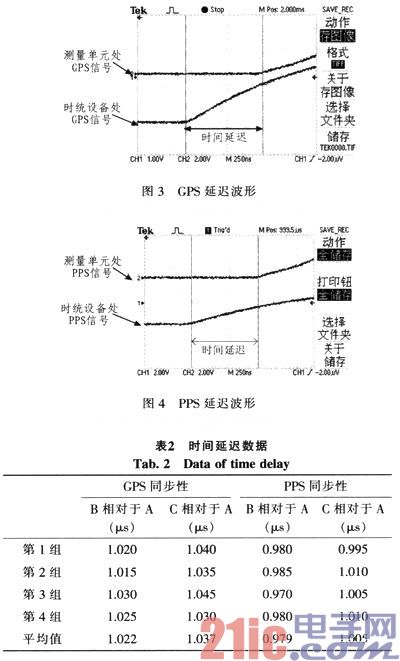
由表2數據可以看出,時統設備與測量單元之間的時間延遲很小,其值在1.000μs左右,主要是由于電子器件本身的延遲以及傳輸線路的延遲造成。考慮到傳輸線路長度為150 m,則線路延遲為0.500 μs,增加電路引起的延遲為0.500μs。
測量單元之間有時間同步誤差,其值在0.020μs左右,主要是由于采用分立的元器件以及傳輸線路不一致造成的,信號進行電平轉換時使用的是分立的MAX488芯片,因此會造成不同測量單元之間的信號有時間同步誤差。
4 結束語
由于GPS信號需要在通視的情況下才可接收,容易受地形地貌的影響,使用時需要考慮環境因素,因此在考慮時間統一時就要設計另外的不依賴GPS的同步方式。本文設計的分路電路在不僅可以對GPS提供的時統信號進行差分傳輸,還可以對其它同步方式比如B碼終端提供的時統信號進行差分傳輸,以滿足分布式測量系統在不同測量環境中的需要。由測試結果可以看出:所設計的時統信號分路電路線路簡單、結構緊湊、工作穩定可靠、時間延遲小,已經應用于激光陀螺形變測量系統中,在其它分布式測量系統,如分布式溫度測量、分布式聲源定位系統中也能得到很好的應用,具有較高的實用價值。

評論