基于C8051F040水下平臺姿態監測電路設計

目前,水下平臺支架一般與船體固連在一起而水下平臺姿態的監測系統放在船上,這樣會出現一個問題:監測到的平臺姿態數據是否反映平臺姿態真實數據。
本文引用地址:http://www.j9360.com/article/201610/308911.htm為此設計了基于C8051F040水下平臺姿態監測電路,本監測電路和相關敏感元件一起固連在水下平臺上。這樣能更準確地反映出平臺姿態及相關數據。本系統提取姿態數據主要通過航姿陀螺系統,而該陀螺系統啟動需要一個初始緯度和航向角才能進行解算出平臺實時的航向、橫滾、俯仰。
1 系統硬件結構
基于C8051F040姿態監測電路系統部分由6個主要功能模塊組成:電源模塊、陀螺系統、深度傳感器、GPS數據系統、單片機C8051F040和RS422串行通訊。電路系統結構框圖如圖1所示。
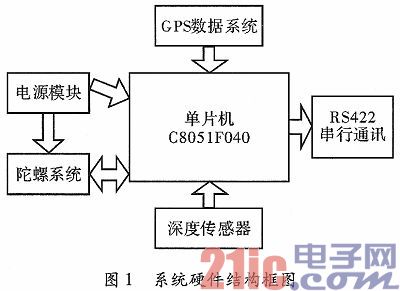
電路系統結構框圖工作原理是首先將GPS數據的航向角、緯度通過串口RS232發送到控制器系統。控制器經提取轉換將其緯度和航向角下載到陀螺系統作為初始啟動值,同時對陀螺系統通訊方式進行設定。此后陀螺系統能周期發送實時平臺姿態數據。深度數據由深度傳感器經信號調理電路直接到C8051F040內部AD模塊獲得。控制器將這些數據通過RS422串行通訊接口定時發送出去。
1.1 GP8數據系統介紹
GPS數據系統功能是接收經度、航向角、UTC時間等信息,并通過RS232通訊口發送至單片機。通過集成的單板式結構的雙頻雙系統定位定向板卡DB982,實現厘米級的定位精度,定向精度1°。單片機軟件完成對GPS數據提取、數據轉換以及數據下載到陀螺。
該系統的GPS數據系統由兩個圓盤型天線以及數據接受處理器構成。數據接受處理器以0.2 s的周期向外發送GPS數據。
1.2 陀螺系統及應用介紹
該陀螺系統采用的光纖陀螺,其工作原理是基于薩格納克(Sagnac)效應。薩格納克效應是相對慣性空間轉動的閉環光路中所傳播光的一種普遍的相關效應,即在同一閉合光路中從同一光源發出的兩束特征相等的光,以相反的方向進行傳播,最后匯合到同一探測點。
若繞垂直于閉合光路所在平面的軸線,相對慣性空間存在著轉動角速度,則正、反方向傳播的光束走過的光程不同,就產生光程差,其光程差與旋轉的角速度成正比。因而只要知道了光程差及與之相應的相位差的信息,即可得到旋轉角速度。
該陀螺系統供電為24 V,通訊方式為CAN通訊。陀螺上電成功后通過相關CAN指令設置其相關的數據通訊方式,并初始化當前緯度和航向角后,陀螺系統將上傳航向、橫滾、俯仰等姿態數據。
1.3 深度傳感器調理電路
深度傳感器輸出的電壓信號,范圍為0~5 V。由于單片機C8051F040的內部基準電壓只能設置到2.4 V,為能保證其0~5 V模數轉換,需進行電路調理。具體電路如圖2所示。
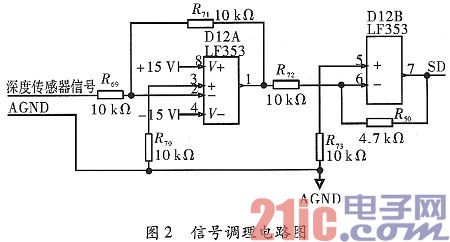
VSD=(R71/R69)×(R50/R72)×V信號 (1)
將其理論數值計算到上式可得到
VSD=0.47×V信號 (2)
當模擬信號達到最大值5 V時,VSD經上式計算得到2.35 V小于其基準電壓2.4 V故滿足A/D轉換要求。因此,可直接將VSD送到單片機C8051F040的A/D轉換端。
在電阻精度選擇,為減少調理電路中電阻實際值偏差造成理論計算值與實際數值之間的偏差。根據式(1)計算,可選擇精度在1%的精密電阻。
1.4 防沖擊可靠RS422通訊電路
RS422采用的是差分傳輸方式,抗干擾能力強,但若僅是簡單的采用一般的設計方案。在惡劣的工業環境下仍會出現接口故障甚至損壞,因此有必要從軟硬件上面引入更多的抗干擾、保護、偵錯等措施來提高接口的可靠性。本文考慮應用環境下RS422串口熱拔插損壞的原理,在此基礎上,提供一種RS422防沖擊可靠通信電路。具體電路如圖3所示。
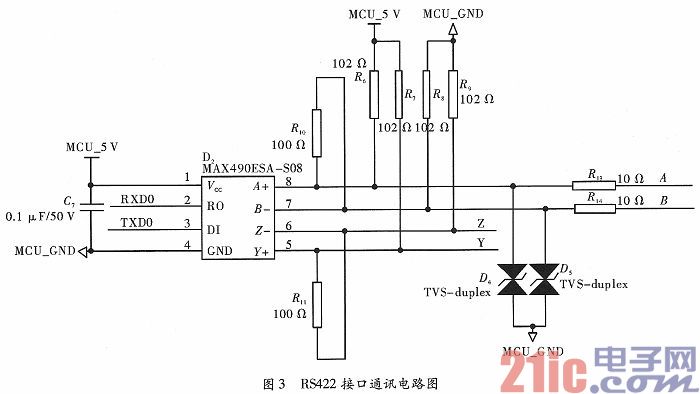
RS422標準規定接收器門限是為±200 mV,當當接收器A電平比B電平高+200 mV以上時,輸出為正邏輯,反之,則輸出為負邏輯。但由于第三態的存在,即在主機在發端發完一個信息數據后,將總線置于第三態,即總線空閑時沒有任何信號驅動總線,使AB之間的電壓在-200~+200 mV直至趨于0 V。這帶來了一個問題:接收器輸出狀態不確定,故應采取一定不確定狀態。通常是在總線上加偏置,當總線空閑或開路時,利用偏置電阻將總線偏置在一個確定的狀態(差分電壓≥-200 mV)。
常見的RS422通訊接口只對低頻率的共模干擾有保護作用,對于頻率很高的瞬態干擾則無效。設計采用方案是旁路保護方法,利用瞬態抑制元件TVS將危害性的瞬態能量旁路到大地。
2 軟件設計
整個軟件設計是姿態及深度數據獲取轉發為核心。姿態數據獲得需GPS系統數據的航向和緯度下載到陀螺系統后,陀螺數據通過CAN接口發送給單片機。深度數據通過啟動A/D轉換獲得,將轉換后的深度數據和陀螺姿態數據按照一定協議通過串口RS422發送出去,具體軟件流程框圖如圖4所示。
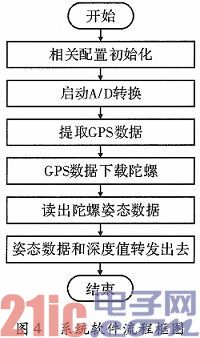
系統軟件設計主要包括5部分程序:軟件初始化配置程序、RS232串口數據提取程序、CAN通訊數據程序、深度A/D轉換程序、RS422串口數據發送程序。
2.1 GPS數據提取程序設計
GPS數據系統的數據分較多種類,其他類型的數據不包含有航向和緯度值,只有“$GGCX”開頭的數據表明該組數據才有效。因此針對系統需要,處理“$GGCX”開頭的數據即可。“$GGCX”數據是以字符串形式呈現,為此接收“$GGCX”數據后,需將其對應的字符串轉換成數值。“$GGCX”數據中緯度是否有效,航向是否有效,需要提取出緯度和航向同時有效的數據,緯度和航向是否有效的標識在第11個逗號后面的一個數字表示(0表示數據無效;1表示緯度或航向有效;2表示緯度和航向同時有效)。
2.2 姿態數據程序設計
姿態數據是通過CAN通訊設置陀螺系統相應的數據格式及發送方式。陀螺系統上電后,等待30 s后發一個暫停的信息。
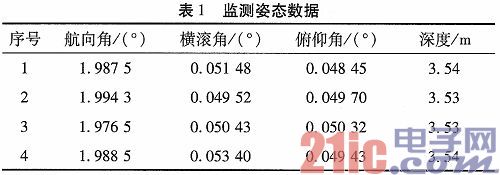
GPS數據提取中,一旦發現緯度和航向同時有效時,將其對應標識置位并將其航向和緯度提取出來。再通過CAN將其航向和緯度發送到陀螺系統中再發送一幀啟動的命令即可。此后陀螺系統便以0.2 s的周期發送平臺的航向角、橫滾角、俯仰角。
2.3 深度數據獲取程序設計
根據實際使用情況可以直接使用C8051F040器件內部集成的12位A/D模塊進行轉換。A/D模塊轉換啟動方式采用相應的定時器溢出啟動。為保證轉換正確性將其轉換10次取其平均值作為其一次深度數值。
最后將陀螺系統的姿態數據和深度值按照一定的協議通過串行通訊接口RS422以0.5 s的周期發送出去。
3 結束語
該電路既有模擬電路又有數字電路部分,因此電路設計考慮數字地與模擬地分開。數字地與模擬地采用單點連接,這樣在進行模擬轉換過程中也發現轉換的深度值最大偏差有8 m。調試發現模擬地有很多雜波,處理方法是在模擬地與外殼之間加一個耐壓500 V,0.1μF的聚酯電容,經處理后深度值偏差降低約0.3 m。
該電路設計已應用到某平臺姿態數據監測中,并成功運用某型水下釋放試驗中,試驗取得較好的效果。



評論