基于LDC1000電感到數字轉換器的金屬探測器

LDC1000是世界首款電感到數字轉換器。只需外接一個PCB線圈或者自制線圈就可實現非接觸式電感檢測,而且可以測試外部金屬物體與線圈的空間位置關系。檢測原理是利用大學物理中的電磁感應原理。在印刷電路板線圈或自制的線圈中加一個交變電流,其線圈的周圍就會產生交變電磁場,此時如果有金屬物體處于這個電磁場中,則會在金屬物體表面產生感應電流,感應電流的大小是線圈與金屬物的距離,大小、成分的函數。利用這個特性配以外部設計的金屬物體可以方便實現水平或垂直距離、位移、振動的測量,可廣泛應用于相關領域。
本文引用地址:http://www.j9360.com/article/201610/308678.htmLDC1000是通過調節振動器的幅度同時檢測LC的諧振損耗來實現阻抗和諧振頻率的測量。通過檢測注入LC諧振單元的能量計算出Rp(等效并聯電阻),轉換為數字量,其數值和Rp的值成反比。
LDC1000支持寬范圍的LC組合5 kHz到5 MHz諧振頻率,Rp的范圍支持798 Ω到3.93 MΩ,此范圍即為器件內部ADC的信號范圍,確定其分辨率。等效并聯電阻Rp與ADC碼值成反比,當金屬物體離線圈最近的時候渦流最大,損耗也最大。
1 系統構成
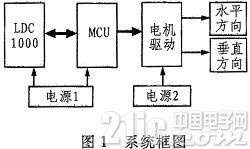
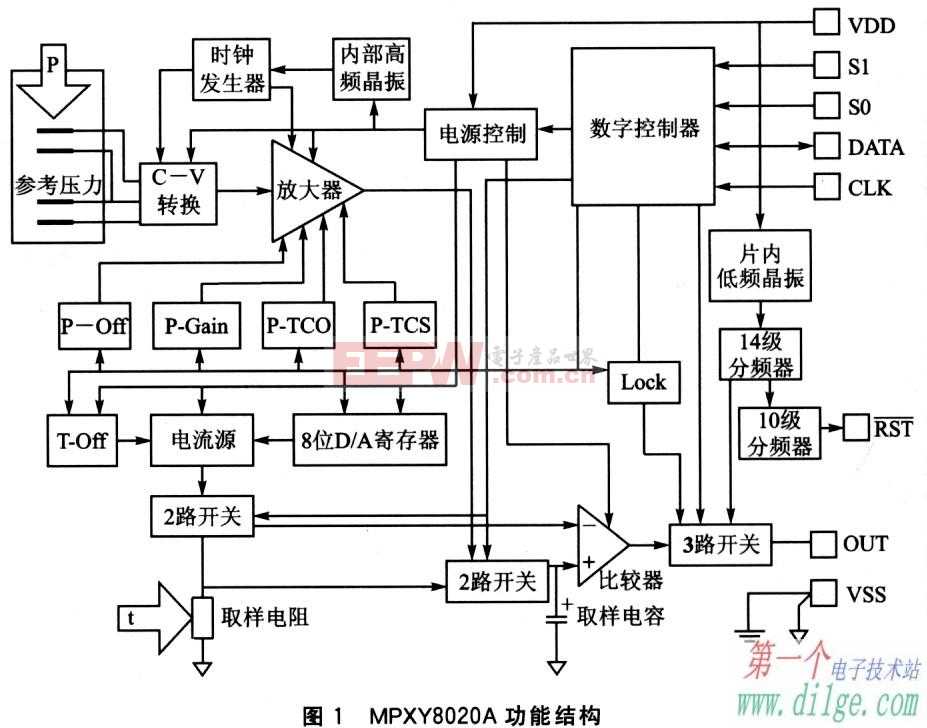
早期金屬探測系統以8位51系列單片機作為控制核心,其硬件電路大體分為2部分,一部分為線圈振蕩電路,一般包括:多諧振蕩電路、放大電路和探測線圈;另一部分為控制電路,包括:霍爾元件、可編程放大電路、峰值檢波電路、模數轉換器、單片機、LED顯示電路、聲音報警電路及電源電路等。由于系統復雜,精確度經常達不到,而LDC1000評估板中集成了振蕩電路、檢測電路、模數轉換器、寄存器等,使用起來就方便很多,減少了很多不可控的調試環節,系統構成比較簡單,測試精度提高。如圖1所示。
2 總體設計方案
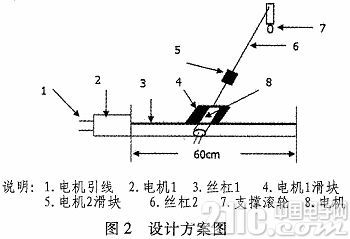
利用LDC1000可將測量量變換為距離的特點,可將其放置在一個能夠自主移動的設備上,就可以完成一定范圍內金屬物體的探測。自主設備需完成自動定位功能,即將LDC1 000所獲得的數據進行對比處理后輸出,控制自主設備的電機運轉,而最終停止在金屬物的附近或上方。本設計整體方案采用TI公司的MSP430微處理器作為控制器與之通過SPI口連接,通過讀取LDC1000的固定寄存器獲得相關數據經處理后驅動電機在50 cm*50 cm平面內移動尋跡,如圖2所示。
3 硬件構成
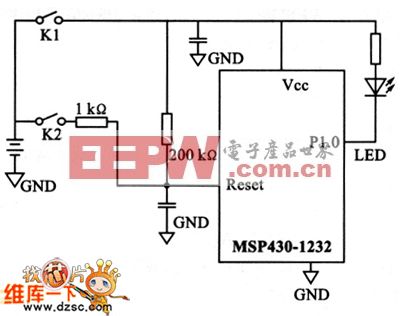
3.1 控制器
德州儀器的MSP430系列是一種超低功耗微控制器系列,采用16位的體系結構,16位的CPU集成寄存器和常數發生器,典型應用為傳感器系統。MSP430-14系列內置16位定時器,12位A/D轉換器,UART、SPI等。本設計中采用MSP430F149,通過SPI口與LDC1000連接。
3.2 與LDC1000的連接
LDC1000與MSP430f149的連接采用四線制SPI連接方式,通過SPI串行總線實現對LDC1000的控制,完成時序定義和數據讀取,在此通信過程中,LDC1000為從機(Slave)。MSP4 30f149其中引腳p3.0接LDC1000的CSB;P3.1接SDO;P3.2接SDI;P3.3接SCLK。
3.3 移動的實現
處理器輸出信號通過H橋驅動電路,完成電機1(X軸)和電機2(Y軸)的控制。根據電機負載,選擇不同的驅動晶體管,本設計中使用8 050和8 550對管實現,采用+12 V直流電驅動。測試中電機運轉正常,控制較為靈敏。通過對設計要求分析,在規定的時間內完成場內任意點的查詢,選擇減速直流電機(80 r/min)。
為保證整個探測區域,采用X—Y軸系統完成,電機1驅動滑塊完成X軸運動(如圖2所示),電機2固定在電機1的滑塊上,完成Y軸的運動,再將主控制器固定在滑塊2上,LDC-1000傳感器則盡量與玻璃平面靠近,采集相應數據。顯示部分采用LCD12864,可以將相應寄存器數據顯示以便觀察。當找到金屬物體時系統通過指示燈和蜂鳴器報警提示。
4 軟件實現
4.1 思路與流程
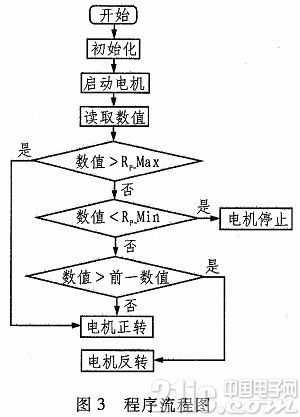
啟動后,先對LDC1000中特殊寄存器賦值,即設定上限和下限,并留出冗余,然后啟動滑塊移動傳感器,在所經過的地方對對Rp相應寄存器的數據讀出并進行數據的比較,去發現數值的變化情況,以此方式來逐次逼近金屬物,從而最終停止在金屬物附近或上方。程序執行過程如圖3所示。
4.2 程序實現
LDC1000中的寄存器地址已在其頭文件LDC1000_cmd.h中定義,編程時將其包含即可。在數據處理中,用戶關心的Rp和Frequency值,Rp可推算出金屬的距離,利用Rp值的變化完成金屬物的定位。Rp占用2個寄存器,可通過保持片選信號有效,進行連續讀寫,此時寄存器地址自動增加。
初始化程序:
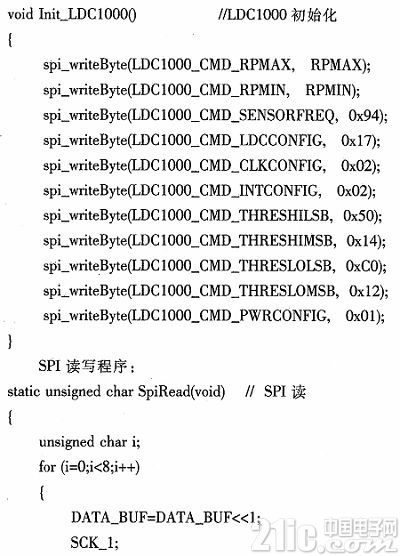
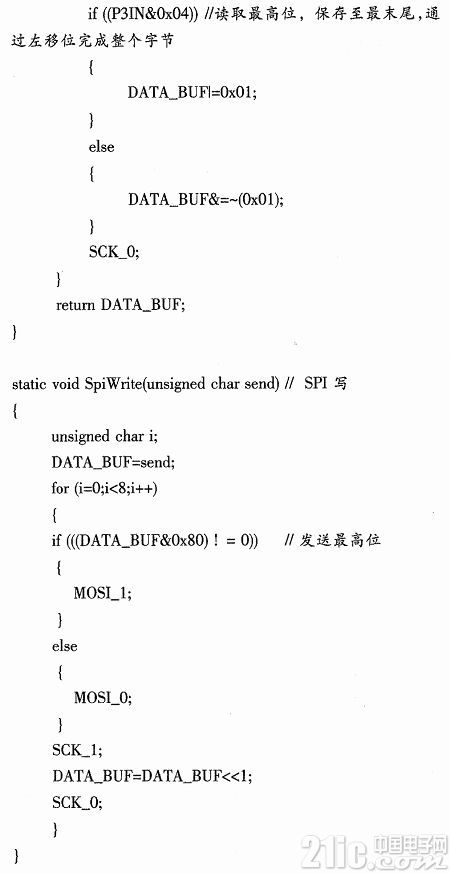
對函數進行調用時,函數參數值的選定應根據LDC1000的SPI通信協議。在主機與從機通訊時遵循以下步驟:片選信號置零;MSP430通過SDI線向LDC1000寫入訪問寄存器地
址,其中最高位0表示寫入,1表示讀出,剩余7位為寄存器的地址。
4.3 傳感器數據讀取
不同的測試對象和距離會產生不同的損耗,其Rp的范圍設置也不同,應用中需要配置寄存器Rp_Min和Rp_Max,如果超出范圍會被鉗位,但也不能設置為極限值,范圍過大,造成內部ADC精度無用。
4.4 實現結果
在測試過程中發現傳感器距金屬物體的距離較近時,顯示值才會有明顯的變化,而多數情況下都屬于超出范圍而被鉗位。而此需要更新程序的算法,還有就是更換自制電感線圈。
LDC1000對濾波電容的要求苛刻,穩定性好、壓電噪聲低,最優值在20 pF~100 nF之間,由LC的諧振時常數決定。電感可選用帶磁芯或空心電感,可借助示波器找到最佳電容值。
5 結束語
本設計采用LDC1000測試板實現了一款自主移動的金屬物探測器,在2014年TI杯陜西省賽區中獲得三等獎。在之后對程序上進一步完善,可在更快的時間內完成對固定區域金屬物的識別與尋找。










評論