仿生機器蛇的設計

摘要:文章主要描述仿生機器蛇的設計,包括機器蛇的結構設計和運動規劃連貫動作的實現。通過對蛇形機器人在有障礙物和無障礙物環境中,進行不同連貫動作的運動規劃和運動形式變化,找出機器人設計的不同側重點;最后,將對本文的不足和實驗時所遇到的困難進行總結,并加以展望。
本文引用地址:http://www.j9360.com/article/201610/308148.htm0 引言
隨著社會的發展,人類的需要,一些在特定環境中擁有獨特技巧和能力的機器人應運而生,蛇形機器人就是其中一種。蛇形機器人是根據蛇的骨骼和運動原理所制造的仿生機器人,憑借其獨特的運動形式和身體結構,應用前景可以說是無可限量。
1 系統總體構成
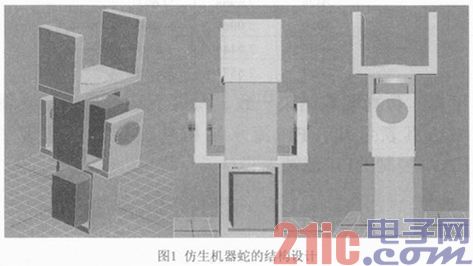
本文所研究的蛇形機器人采用Solid Snake(SS)機構設計。Solid Snakc利用垂直和水平方向正交的關節來模擬蛇類生物柔軟的身體,每兩個正交的關節組成一個單元體,每個單元體相當于一個萬向節,具有兩個方向的自由度,整體形成一個高冗余度的結構體。這樣的機構設計使蛇體具有向任何方向彎曲的能力。其殼體機構、舵機與殼體安裝方式和兩個單元連接方式,即以垂直→水平→垂直的方式相連接,以模仿生物蛇的關節,如圖1所示。
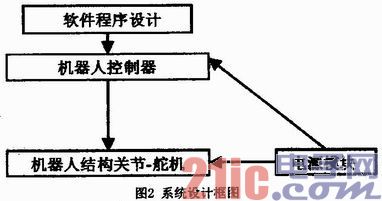
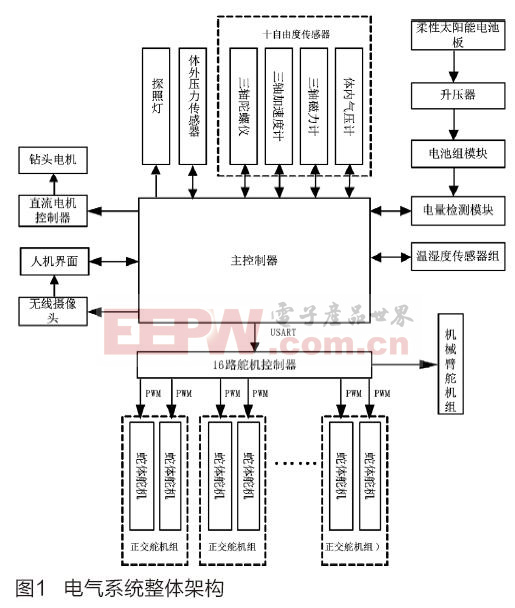
系統總體設計框圖如圖2所示。首先在計算機上測試每個插座對應的舵機,簡而言之就是對號入座,首先找出每個舵機的零點位置,然后編程,將已編寫好的程序下載到控制板里面,通過控制板實現對舵機的直接控制,電源控制板為所有的舵機提供動力,最后經過多次的調試仿生機器蛇即可以完成一套連貫的動作。
2 仿生機器蛇的運動規劃
要想完成仿生機器蛇在現實環境中自由運動,就需要先對其進行運動力學分析和路徑規劃。
2.1 仿生機器蛇的運動力學分析
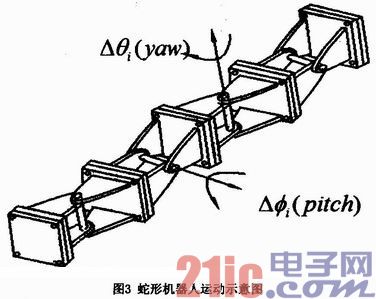
本文所研究的蛇形機器人由垂直方向與水平方向交替連接,依次可以做二維運動。而每個舵機的范圍在-90°~+90°之間。當蛇形機器人在平面上運動時,它的運動示意圖如圖3所示。
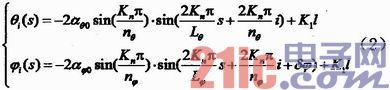
(1)平面蜿蜒運動。平面蜿蜒運動是通過控制關節模塊水平軸的關節保持直線,而垂直軸的關節呈正弦變化實現;采用的算法公式為:
(2)側向運動。側向運動是控制關節模塊的垂直軸的關節和水平軸的關節都呈正弦變化,兩個曲線之間有一個相位差;采用的算法公式為:
(3)伸縮運動。伸縮運動方式可以通過控制它的垂直軸的關節保持直線,而水平軸的關節呈正弦的變化實現。它的垂直面內運動,適合穿越狹小的管道。采用的算法公式為:
(4)翻滾運動。翻滾運動是控制關節模塊的垂直軸的關節和水平軸的關節變化而實現,其采用的算法公式為:
2.2 仿生機器蛇的路徑規劃
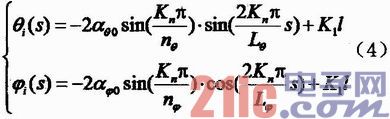
所謂的路徑規劃就是指在障礙物的環境中,按照某一特定的評價標準,尋找一條從起始狀態到目標狀態的不會發生任何碰撞的路徑。如果把運動物體看作是所研究的問題的某種狀態,把障礙物看成是所要解決的約束條件,無碰撞路徑規劃就是滿足次約束的解,因此空間路徑規劃可以描述成求解滿足約束條件的過程。為了更好地理解路徑規劃,可以將其分解成兩個問題。
(1)尋找空間問題。在某個指定區域R內,確定物體的安全A位置,使其不與在次空間內的已有物體B發生碰撞。
(2)尋找路徑問題。在以上指定區域R內,確定物體A從初始位置到目標位置的安全途徑,使其在移動過程中物體A與物體B不發生碰撞。
圖4表示的就是在障礙物環境中物體A在不碰撞物體B的情況下到達指定區域。
3 仿生機器蛇連貫動作的設計
軟件采用C語言編寫,舵機控制程序進行相應模塊化設計,形成基本動作“積木”單元,組合連貫動作套件包。這些“積木”單元都很容易互相拼接、組裝。用這些“積木”可以很方便地搭建出各種發揮想象力的機器人,并可為自己搭建出的機器人編程。
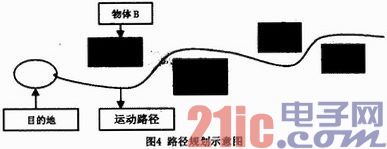
3.1 蛇形機器人連貫動作
蛇形機器人的連貫動作主要是將前面幾種運動策略連接而成。圖5所示為蛇形機器人連貫動作結構圖。
3.2 蛇形機器人一爬行運動
蛇形機器人的爬行動作,屬于蛇類的蜿蜒運動,自然界中蛇類的運動都是“S”形的,類似于正弦曲線。由于實驗條件的限制,本研究所做的爬行動作以“弓”形代替。如圖6所示。
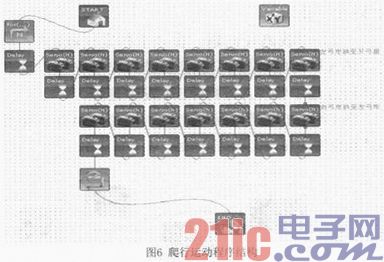
以下實驗數據,表示著蛇形機器人由左“弓”形到右“弓”形時的各個舵機的角度,因為爬行動作并不需要太快,所以速度全都設置為150。這樣每個動作的變化都不是很快,但是相應的蛇形機器人所做的每個動作都很平穩。每個動作完成后有2s的延時。爬行運動的程序結構如圖6所示。
3.3 蛇形機器人一翻滾動作
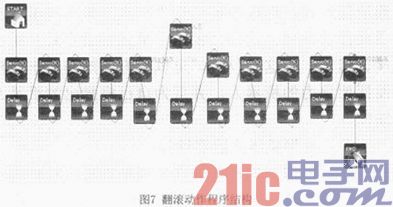
蛇形機器人的翻滾動作屬于蛇類的側向運動。翻滾動作的實現首先要使蛇形機器人有一定的彎曲,然后在固定兩個點,調試其余的舵機,使其可以360°的翻滾,如圖7所示。
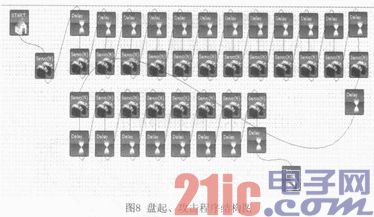
3.4 蛇形機器人一盤起、攻擊動作
蛇形機器人盤起、攻擊的動作是比較綜合的一個動作,因為不同的需要,每個動作中每個舵機的速度要求也不一樣。其程序結構如圖8所示。
還有蛇形機器人的其他連貫動作:1)蠕動動作,可以視為蛇類的直線運動,利用這種移動方式可以使蛇形機器人沿著一條直線前進。而且即使改變了外界環境,也可以根據環境,對機器人進行適當的調節,適應性強;2)側移動作,利用蛇身扭動與地面產生的摩擦力使整個身體發生位置的改變,動作簡單,可以通過改變該動作的重復次數來改變運動方向,即使環境改變,對蛇形機器人的側移也沒有太大影響。
4 系統的實現
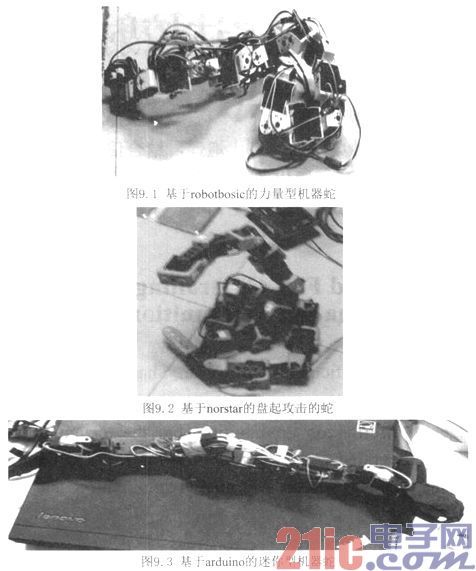
系統實現了三種平臺的仿生機器蛇,如圖9所示:1)基于robotbosic設計的力量型機器蛇,有十四個自由度舵機組成,每個自由度大約1.2cm。能完成諸如扭動、前進、蛇頭上揚等動作。小體積是我們的一大特色,簡化了供電裝置,將電源與舵機經過特殊的處理裝置在一起,讓動作更加方便,同時也減少了大量的外遷線,使蛇能更加靈活;2)基于norstar可蠕動前進和盤起攻擊的仿生機器蛇,最終完成了一條14個自由度、長約1.2m的大蛇,一條7個自由度、長約0.6m的小蛇,實現蛇的基本動作,將驅動裝置安裝到蛇身體上,縮小蛇身體體積。實
物如圖8所示。優點在于有短信和來電兩個功能,不足之處探測器過于敏感;3)基于arduino設計的迷你型機器蛇,共有八個小舵機組成,共15cm。蛇頭與蛇尾增加泡沫設計使蛇的形象更加逼真。小蛇能夠左右擺動,還能向前蠕動前進。
5 結束語
本文所研制的三種機器人基本是用舵機串聯而成,結構簡單,連貫動作能舒展完成,但不足是蛇形機器人由十幾個舵機串聯而成,因為串聯的舵機數量太多,導致驅動電流越來越小。建議改進措施有:1)利用一個電流放大電路增大驅動電流;2)由于串聯的舵機數越多,驅動電流就越小,所以如果在條件允許的情況下,可以選擇減少幾個舵機;3)將所有舵機并聯,這樣可以使各個部分舵機電壓相同,驅動電流也趨于穩定。


評論