基于CAN和WSN的煤礦語音通信系統設計

摘要
本文引用地址:http://www.j9360.com/article/201610/307649.htm針對現有煤礦語音通信系統的不足,設計了一種既可以夠滿足正常語音通信要求,又可以在緊急情況下保障應急語音通信的煤礦語音通信系統。該系統采用集成無線收發器和8051微處理器的CC2530作為主控芯片,采用AMBE2000語音編解碼芯片,正常情況下采用CAN總線通信模式,應急情況下采用無線通信模式。詳細介紹了系統的硬件設計和軟件設計,并通過定性和定量兩種方法進行了實驗,通過實驗證明該系統的聲音強度、語音音質、失真度等指標均能滿足現場的需求。
引言
煤礦安全一直是煤礦生產中的重中之重,保障井下語音通信特別是應急情況下的語音通信是保障煤礦安全生產的前提。現有的井下語音系統一般包括有線和無線兩種方式。其中,有線方式主要包括調度電話和井下擴音電話系統兩種;無線方式主要為井下小靈通系統(基站之間也是基于有線的)。這些傳統的語音通信系統在正常情況下可以滿足煤礦語音通信的需要,但如果發生緊急情況,有線連接被切斷,現有的語音通信系統將面臨癱瘓的可能。而新興無線傳感器系統在語音通信中又面臨著功耗控制等難題。因此建立一種具有自愈性、自組織,能在緊急情況下恢復和保障井下應急語音通信的系統成為當務之急。
針對以上問題,本文結合CAN總線和無線傳感器網絡的優點,提出了兩級網絡的井下語音通信系統,采用CAN總線和無線傳感器網絡共同組網。在正常情況下采用CAN總線通信方式,一旦發生緊急情況,無線傳感器網絡自動啟動,同時利用無線傳感器網絡的自愈性能,采用人工布點的方式可以快速恢復遭到破壞的語音通信系統,盡快與被困礦工取得聯系,保障應急救援工作的順利進行。
1 系統網絡結構
本文設計的兩級網絡語音通信系統結合了CAN總線和無線傳感器網絡的優點,采用了CAN總線網絡和WSN無線傳感器網絡共同組網的方式。在正常情況下,采用CAN總線來傳輸語音信號;在緊急情況下,如電源或電纜被切斷時,無線傳感器網絡自動啟動,采用無線傳感器網絡傳輸語音信號。另外,還可以通過人工部署新的傳感器節點來擴展或恢復被破壞的無線傳感器網絡,保障井下語音通信的正常。正常情況和緊急情況下的系統結構分別如圖1和圖2所示。
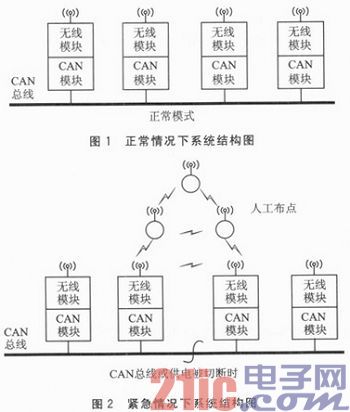
系統節點分為正常的語音節點和緊急情況下使用的傳感器節點兩種。語音節點具有CAN總線和WSN兩種通信模式,是正常組網時的主要節點;傳感器節點僅具有無線通信方式,是在緊急情況下恢復和擴展語音通信網絡時所采用的。傳感器節點和語音節點在采用無線通信時采用多跳中繼傳輸,配合CAN總線的有線通信,實現正常和緊急情況下的語音通信。
2 節點硬件設計
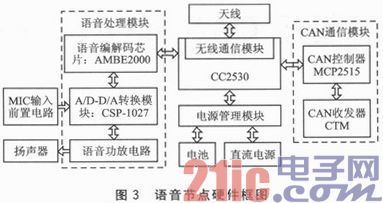
語音節點由CC2530、語音處理模塊CAN通信模塊、電源管理模塊等組成;傳感器節點由CC2530、語音處理模塊、電源管理模塊等組成。其中語音節點的結構如圖3所示。
2.1 CC2530及無線通信模塊
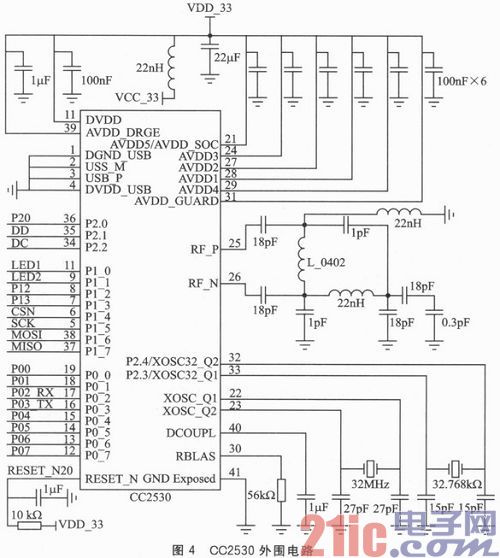
無線網絡節點的核心是微處理器芯片,本設計采用了TI公司推出的CC2530片上系統芯片。CC2530是用于IEEE 802.1 5.4、ZigBee和RF4CE應用的片上系統(SoC)解決方案,它將一個高性能的RF無線收發器和一個增強型的8051微處理器集成到一塊芯片上,該芯片具有優異的無線性能、低功耗、低成本,而且其內部集成8路12位ADC、2個支持多種串行通信協議的USART模塊、21個通用I/O接口等,仗其有良好的擴展性。CC2530的主要外圍電路如圖4所示。
2.2 語音處理模塊
語音處理模塊包括語音采集模塊、A/D和D/A轉換模塊、語音編解碼模塊、語音功放等組成。語音信號通過MIC電路采集后,送到A/D、D/A轉換模塊進行A/D轉換和壓縮處理,處理過的信號通過語音編解碼模塊進行編碼,變成數字信號發送出去。
2.2.1 A/D、D/A轉換
MIC采集的語音信號為模擬信號,要進行數字語音傳輸首先要將模擬信號轉變為數字信號。本系統采用的A/D、D/A轉換芯片是Lucent公司的CSP1027。CSP1027是一款高精度線性語音頻帶編解碼器,具有16位的A/D、D/A轉換能力。它的模擬接口處內置了音頻前置放大器,
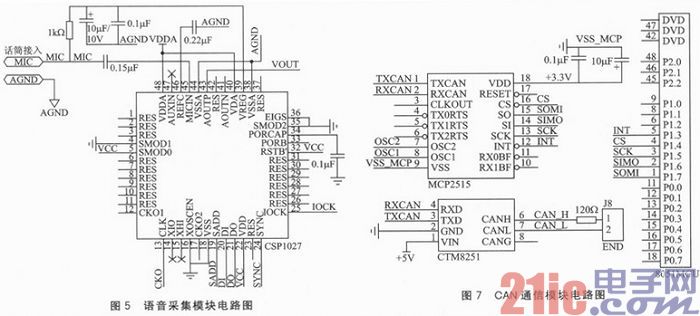
因此在電路設計中,可以直接將小信號的語音信號直接輸入CSP1027的模擬端。語音處理模塊的電路設計如圖5所示。
2.2.2 語音編解碼模塊
經過A/D轉換后的語音信號數據量很大,而CAN通信和WSN通信的帶寬有限。因此必須對采集的語音信號進行壓縮和編碼處理。系統采用的編碼芯片為AMBE2000編解碼芯片。
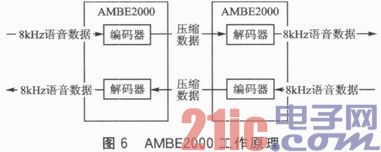
AMBE2000是一種高性能、低功耗、多速率的單片語音編解碼芯片,其數據壓縮速率在2.0~9.6 kbps范圍內可調。AMBE2000將語音數據每20 ms壓縮為一個語音數據包并將數據送到MCU,MCU將其中的有用數據送到CAN控制器或無線控制器,以CAN數據或無線數據的形式發送出去。當沒有聲音信號輸入時,它能夠檢測到靜音并寫入標志位。在解碼器部分,當它檢測到丟失一幀語音數據時,它能夠依據上一幀數據盡量真實地預測下一幀語音數據,給出適當的語音信號,本系統選用AMBE2000的編碼速率為2.4 kbps。AMBE2000的工作原理如圖6所示。
2.3 CAN通信模塊
CC2530沒有集成CAN控制器,本設計選用了帶有SPI接口的獨立CAN控制器MCP2515,可方便與CC2530連接。本設計選用的是周立功公司的集成光耦、DC/DC隔離CAN收發器的CTM8251,該收發器具有DC 2500 V的隔離功能。CAN通信模塊的電路如圖7所示。
3 系統軟件設計
系統的軟件設計采用模塊化設計方法,系統的工作流程為:
①模塊初始化。模塊初始化主要包括CC2530初始化、引腳初始化、無線模塊初始化、CAN模塊初始化、AMBE2000初始化等。
②正常工作模式。正常工作模式下采用的是CAN通信,因此無線模塊處于休眠狀態。系統檢測通信按鈕是否按下,當按鈕按下時,啟動語音處理及編解碼模塊,并通過CAN模塊發送出去。當CAN模塊接收到總線數據時,產生中斷,CAN模塊接收數據并送到語音處理模塊進行解碼。
③緊急狀況模式。當系統出現異常情況時,會導致電源中斷,通信電纜被切斷,甚至有些節點遭到損壞無法正常工作。語音節點的無線模塊啟動,自動進行組網,改為通過無線來傳輸語音信號。同時在節點遭到損壞的區域,人工布置傳感器節點,這些節點與語音節點自組織組網,形成新的無線傳感器網絡,來恢復和保障語音通信。
由于語音通信對系統的實時性要求比較高,而對傳輸過程中短暫的丟包和錯誤具有較高的容錯率,因此傳統的可靠傳輸控制協議并不完全適用于語音通信系統。本設計中,采用了一次握手,多個數據連續通信的不可靠數據報文傳輸機制,來保證語音通信的實時性。
4 系統測試
為了驗證系統的語音通信性能,特別是無線語音通信性能,對系統進行了定量和定性兩種試驗測試。試驗設備由語音節點、電源模塊、信號發生器、聲級計、掃頻儀等組成。
4.1 定量試驗一
系統試驗方法為:兩個節點通過無線傳輸,其中1號節點通過信號發生器輸入不同幅值的1 kHz的正弦信號,通過分貝計在2號節點的喇叭正前方1 m處測試語音聲強。測試連接示意圖如圖8所示。
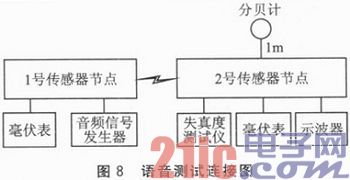
經測試,語音聲強可達到85dB,語音失真度小于15%。調節音頻信號發生器,使信號頻率從350~3 000 Hz變化,測得頻響優于±6dB。
4.2 定量試驗二
經過定量試驗后,再對系統的語音質量進行定性測試。測試方法為:將接收節點固定,對發送節點距離不同情況下的語音音質、語音流暢度的情況進行定性判斷。具體測試情況如表1所列。
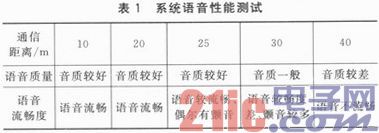
經過測試,當節點距離在20 m內時,語音流暢、音質較好;在25 m內時開始出現顫音,但仍能滿足語音通信的要求;在30 m時,語音質量開始下降;40 m時音質較差,無法滿足語音通信要求。因此語音節點布置距離應保證在25 m以內,條件允許時應盡量保證在20 m內為宜。
結語
本文設計的井下語音通信系統,充分結合了有線通信和無線通信的優點,正常情況下采用CAN通信來傳輸語音信號,保證系統的穩定性和可靠性。緊急情況下采用無線通信來傳輸語音信號,并且能夠通過人工布點的方式接續被破壞的節點,保障緊急情況下的語音通信。通過實驗證明了系統聲強、失真度、頻響等性能指標均符合現場使用的要求,且現場布置時節點間距離以不大于25 m為宜。





評論