基于WiFi的可實時視頻同傳的探測小車

摘要:為了在高溫、有毒等特定環境下進行視頻圖像數據、氣體參數等環境狀態的檢測,本文設計一種基于單片機的可實時視頻同傳的探測小車。Windows監控端通過DB120無線路由器與單片機STC89C52控制中心通信,發送控制信號給電機驅動模塊L298N、LED模塊,實現小車轉向、進退及燈光的控制;攝像頭模塊、溫度傳感器模塊進行視頻數據、溫度數據的采集,并實時回傳給Windows監控端。
本文引用地址:http://www.j9360.com/article/201610/307278.htm引言
隨著自動化技術的發展,智能控制廣泛應用在軍事、科研、民用領域。無線探測小車集成了電子、機械、通信、傳感器、計算機軟硬件、人工智能及自動控制等多方面的技術。此外,其成本低、體積小、操作簡單,能較好地應用在勘探、環境監測等應用。本文旨在設計一種能在高溫、有毒等特定環境下,進行遠距離無線遙控以及攝像、測溫探測的單片機小車控制系統。
1 系統總體方案設計
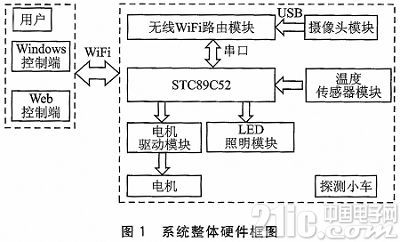
本項目設計的是集單片機控制模塊、攝像模塊、溫度傳感器模塊、照明模塊及路由模塊為一體,可實時視頻傳輸及環境探測的探測小車,其系統硬件結構框圖如圖1 所示。探測小車以單片機芯片STC89C52為控制中心,電機驅動模塊L298N進行小車直流電機的驅動控制,溫度傳感器進行外部環境的檢測,攝像頭模塊進行視頻圖像的采集,LED模塊進行照明,并通過無線WiFi路由模塊實現Windows控制端與小車的無線通信。
2 硬件設計及選型
硬件部分主要采用市場上比較流行、穩定性高且性價比高的模塊,此外,大部分模塊都組裝簡單、升級方便、可移植性強,便于項目的開發及后續升級維護。例如,攝像頭可通過USB接口直接連到路由器上,無需單片機轉發,簡化了視頻流的傳輸。
2.1 電機驅動模塊
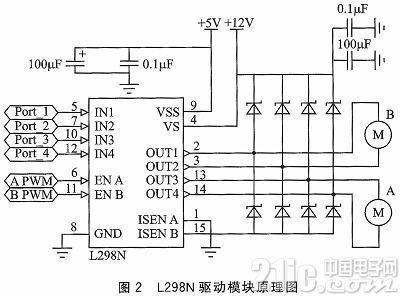
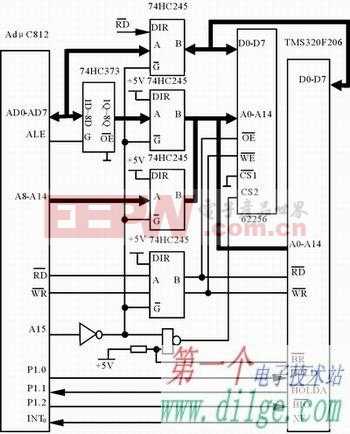
電機驅動模塊選用L298N,可接收標準的TTL邏輯電平信號,可驅動46 V/2A以下的電機。其驅動模塊原理圖如圖2所示,L298N輸入電壓是12V,L298N的OUT1、OUT2和OUT3、OUT4之間分別接2個電機,本項目可直接使用單片機的I/O輸入口Port1~Port4,APWM、B PWM改變L298N的IN1、IN2、IN3、IN4引腳及ENA、ENB使能端,從而分別實現控制電機的正反轉及停止功能。
2.2 無線WiFi路由模塊
無線WiFi路由模塊采用的是DB120路由器,此路由器是OpenWRT系統,刷機升級十分簡單。本項目可以通過網絡下載,在同一網段內通過瀏覽器登錄192.168.1.1,選擇“0829-openwrt-rc6-RG100A_DB120-squashfs-cfe.bin”版本的固件進行燒錄。固化后,該路由模塊可作為轉發站,實現USB攝像頭的加載及與單片機的串行通信。
2. 3 攝像頭模塊
本項目選用中星微301主控芯片的USB攝像頭模塊,通過簡單的路由設置就能快速實現攝像頭的掛載。掛載成功后,可通過路由器的WiFi轉發攝像頭的動態視頻至Windows控制端。
2.4 溫度傳感器模塊
本項目選用DALLAS公司生產DS18B20的一線式溫度傳感器,進行外部環境數據的監測,其線路簡單,僅有GND、DQ、VDD三個引腳。其中,DQ為數字信號輸入/輸出端,GND為電源地,VDD為外接供電電源輸入端。
3 軟件設計
本項目中,用戶監控端與探測小車通過WiFi路由進行數據傳輸,因此,開發人員在軟件設計與實現過程中需要對小車進行控制編程、監控視頻動態顯示、控制界面GUI設計及網絡編程(Socket編程)。
項目開發過程中,選用Keil C51開發環境,對探測小車進行軟件編程,實現對外部環境的測溫及小車電機的控制;選用編程簡單靈活、可移植性強的QT開發環境,進行Wind ows控制端的GUI設計、Socket編程及視頻動態顯示。此外,還選用了單片機多功能調試助手軟件、TCPUDP—Debug軟件進行單片機的通信測試。
3.1 小車電機控制編程
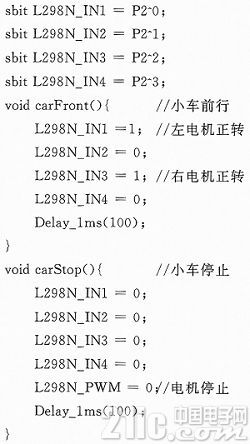
進行電機驅動模塊L298N的電路連線,Port1~Port4分別為P2^0~P2^3,查閱L298N的數據手冊,對照其邏輯功能表在Keil C51下進行電機前進、后退、左轉、右轉和停止的編程。編程樣例如下所示:
3.2 Socket編程
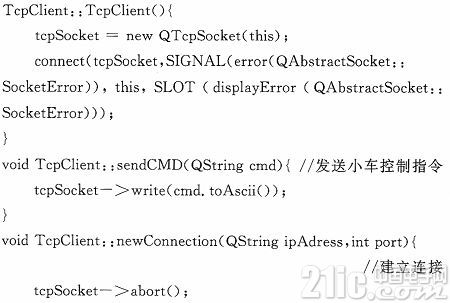
探測小車與路由器通信中,主要用到了QTcpSocket客戶端和QTcpServer服務器,其中本項目進行監控端Socket編程。按照通信的交互時序,先創建TcpSocket類,然后建立連接。其關鍵代碼如下:
3.3 監控端GUI設計及視頻動態顯示
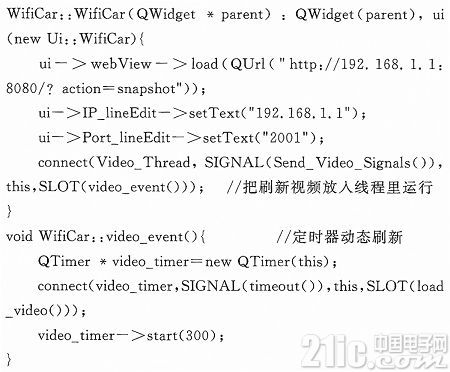
進行監控端界面設計時,需考慮到整個界面的布局及易操作性。本項目選用WebView控件進行視頻的顯示;ButtonBox控件作為前后左右等按鈕開關;Label控件顯示溫度值、時間和標題;LineEdit控件作為IP和端口號輸入端。
由于WebView控件只能加載路由轉發的靜態圖像,因此,為了實現監控端實時視頻動態顯示,除了進行IP地址及端口號綁定設置外,還需要多加一個定時器來動態刷新。以下為關鍵代碼:
3.4 實驗結果
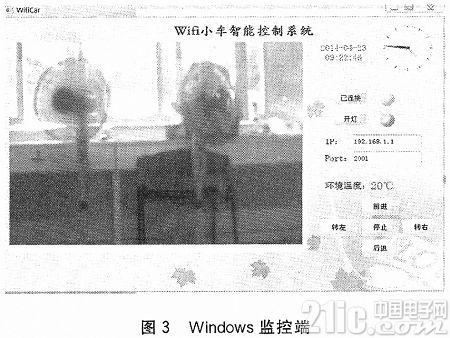
通過軟硬件設計、編程調試及后期功能測試,探測小車系統能較好地實現小車控制、外部環境監測、視頻實時動態顯示、LED照明等功能,整個控制過程中,可操作性較強系統啟動后,用戶只需進行IP及端口的綁定設置,然后單擊“連接”按鈕;連接成功后,該按鈕將變成“已連接”狀態且右邊的紅色標識變成綠色,此時,通過監控端上的按鈕,用戶可對小車進行前后左右的控制、開關LED燈、獲取實時視頻圖像及外部環境溫度。Windows監控端如圖3所示。
結語
基于WiFi的實時視頻同傳的探測小車是一個集單片機、路由器、攝像頭、QT等各種軟硬件于一體的智能化探測小車系統。本系統只是一個基礎平臺,包括小車行走控制、燈光控制、測溫、實時視頻傳輸、數據回傳功能,其軟硬件設計簡潔,開發成本低。在今后的研究中,針對不同的應用及環境特性,項目研發人員可以在此基礎上增加相關模塊功能,如云臺舵機、機械手臂、氣體檢測傳感器模塊,可對外部環境實現全方位的視頻監控、危險物品拾取、有毒氣體的預警等。









評論