簡易風洞控制系統(tǒng)設計與實現(xiàn)

摘要:系統(tǒng)通過高速直流電機帶動風扇旋轉(zhuǎn)產(chǎn)生風壓,在管道內(nèi)產(chǎn)生空氣流動,構(gòu)成簡易風洞。設計了以MSP430F149單片機為核心的控制系統(tǒng),該系統(tǒng)由MSP430單片機最小系統(tǒng)、超聲波檢測、電機驅(qū)動、液晶顯示器以及鍵盤控制,語音播報模塊構(gòu)成;通過PID核心算法,輸出可調(diào)占空比的PWM波,驅(qū)動小球的上下移動;并通過超聲波位置檢測模塊,實時檢測小球的高度。試驗結(jié)果表明該控制系統(tǒng)具有響應速度快、控制精度高、抗干擾能力強等優(yōu)點。
本文引用地址:http://www.j9360.com/article/201610/306622.htm1 系統(tǒng)方案
1.1 系統(tǒng)總體方案設計
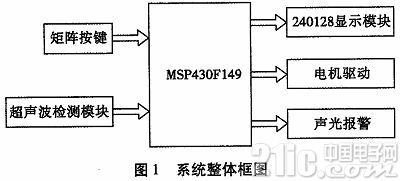
系統(tǒng)以MSP430單片機為核心模塊,通過電機驅(qū)動模塊帶動扇葉,向圓管之內(nèi)鼓風,將乒乓球吹起。通過超聲波模塊將乒乓球在圓管之內(nèi)的位置檢測出來之后返回位置數(shù)據(jù)給單片機,通過單片機的判斷,控制風力的大小,將乒乓球控制在所要求的位置。在240*128液晶上顯示界面和系統(tǒng)當前的參數(shù)。還可以通過矩陣按鍵設置參數(shù),達到任意控制的要求,如圖1所示。
1.2 設計方案論證
1.2.1 電機驅(qū)動模塊
系統(tǒng)采用1298N電機驅(qū)動模塊。L298N具有四通道輸出,可以驅(qū)動兩個直流電機。且該模塊的驅(qū)動電流最大可以達到1.5 A。可以滿足電機的驅(qū)動要求,還可以在輸入端加上光耦隔離,可以防止電機停止時反向脈沖燒壞單片機。
1.2.2 定位模塊
超聲波的檢測距離長,可達到4.5 m,而且該模塊的反應速度也較快。可以根據(jù)自己所要求的時間來具體調(diào)節(jié)發(fā)射和接收時間,操作較為方便。另一方面,紅外對管檢測方式具有模塊的操作簡單,只需將該模塊的電位器調(diào)節(jié)就行,不足在于在垂直距離較長情況下,需要繁瑣的步驟才能實時顯示球的所在位置。但可以作為某一位置點的定位之用。
因此設計中采用了超聲波模塊與紅外對管檢測相結(jié)合的方式進行定位。
1.2.3 液晶顯示模塊
采用LCD240*128液晶顯示,除了能夠顯示出字母、數(shù)字之外還可以顯示多種取模圖片。可以做到顯示多樣化。有較好的人機交換界面。
2 理論分析和計算
2.1 超聲波檢測距離計算
由于超聲波原理,超聲波在空氣之中傳播遇到障礙物的時候就會馬上返回。假設超聲波的傳播速度為V,發(fā)射和接收的時間差為t,就可以計算出發(fā)射點距離障礙物的距離S,如公式(1)所示。
S=V*△t/2 (1)
根據(jù)系統(tǒng)之中的超聲波模塊的特點,通過計算可以得出在2 cm到4.5 m之內(nèi)的距離測量值。
2.2 自制風機的確定
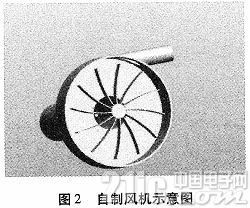
在系統(tǒng)中,需要將乒乓球在圓管之內(nèi)上下吹動,這就會對風機的要求很高。普通的小風扇無法滿足要求。所以選擇了高速直流電機,采用大PVC管和豎直圓筒,并結(jié)合鼓風機結(jié)構(gòu),將風吸入風道之后,經(jīng)過一圈回流之后送入圓管。這樣自制風機結(jié)構(gòu)簡單,穩(wěn)定度高,較為可靠。圖2為自制風機示意圖。
2.3 乒乓球控制算法的確定
對于乒乓球的運動過程有著嚴格的要求。所以在控制小球的時候需要進行精確控制,通過選擇適當?shù)?a class="contentlabel" href="http://www.j9360.com/news/listbylabel/label/PID算法">PID算法和有效的參數(shù)正定可以達到高精度控制目的。PID公式如式(2)所示。

根據(jù)上述公式,在最開始確定比例系數(shù)之后就開始確定微分器和積分器的數(shù)值。最終將三個系數(shù)寫入程序之中,達到穩(wěn)定。
3 電路與程序設計
3.1 電機驅(qū)動電路設計
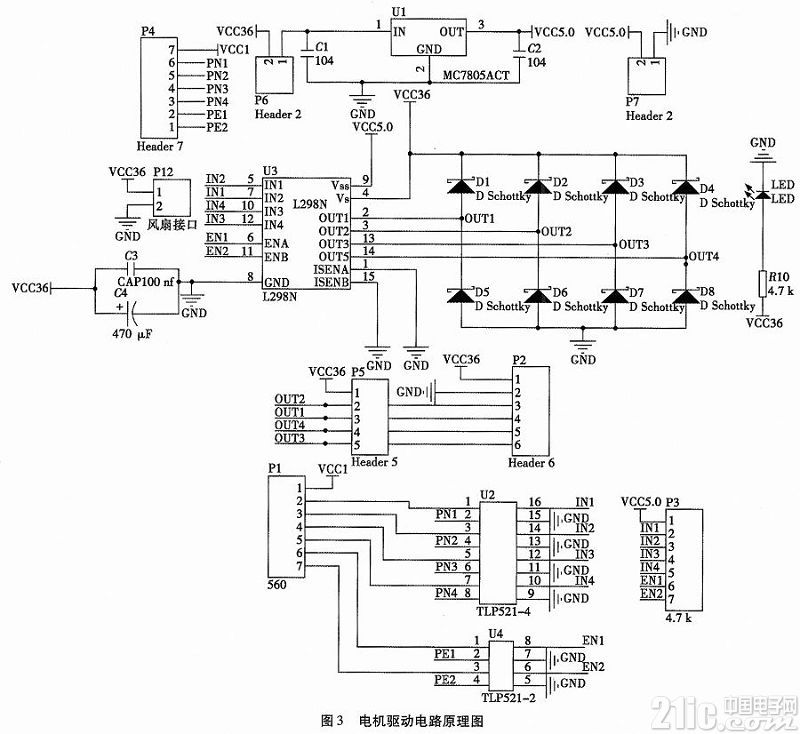
在輸入信號之后,通過光耦隔離,在光耦內(nèi)部通過光電信號之間的轉(zhuǎn)換,將輸入的PWM波轉(zhuǎn)換為電流電壓相對較大的PWM信號。其信號保持一致或者取反。輸出之后可以達到利用小電壓小電流驅(qū)動大電壓大電流的作用。驅(qū)動芯片選擇了常用的高電壓大電流的全橋驅(qū)動芯片L298N,其響應頻率高,還可以實現(xiàn)頻繁的無極快速啟動,制動和反轉(zhuǎn)等優(yōu)點,電機驅(qū)動電路原理圖如圖3所示。
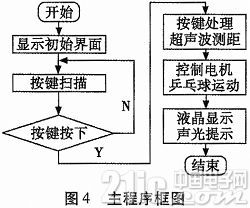
3.2 主程序框圖
系統(tǒng)主程序框圖如圖4所示。
4 測試方案與測試結(jié)果
4.1 測量儀器
數(shù)字秒表,卷尺,數(shù)據(jù)表。
4.2 系統(tǒng)測試方法及測試數(shù)據(jù)
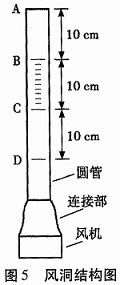
按圖5所示風洞結(jié)構(gòu)圖,進入操作界面之后,開始測試。從第一項開始,逐項依次測試,使用卷尺及數(shù)字秒表,看時間是否達到要求。
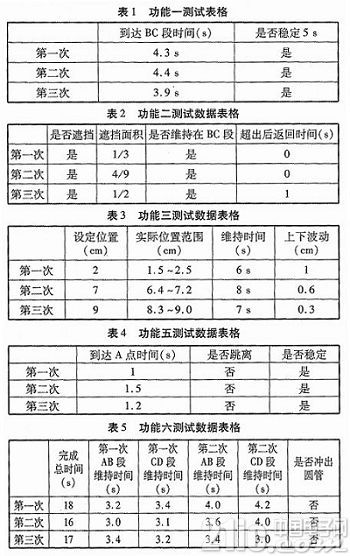
4.3 測試結(jié)果
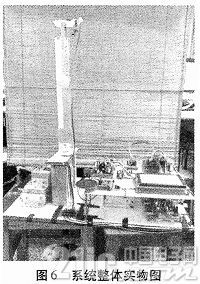
經(jīng)過一系列測試表明整個系統(tǒng)能夠完全達到要求。不僅僅是完成要求中的精度,更是在原來的精度要求之上更加的完善和精確,并且加入了語言播報系統(tǒng),可以根據(jù)系統(tǒng)的不同狀態(tài)發(fā)出不同的聲音。整個系統(tǒng)經(jīng)過測試,工作穩(wěn)定,精度高。系統(tǒng)實物如圖6所示。
5 后記
簡易風洞及控制系統(tǒng)設計與實現(xiàn),此設計獲得2014年湖北省電子設計競賽TI杯,體現(xiàn)了自動控制與機械設計一體性的要求,是對自動控制原理的充分應用。作品本身對于用于中小學學生對自動控制原理的理解和科普具有意義。








評論