智能巡邏車系統設計與實現

摘要:基于8位微控制單元(Micro Control Unit)MCU,通過設計上位機實現了對巡邏車進行遙控、自動和尋跡三種模式的切換以及控制數據的采集周期。系統在該三種模式下完成了環境的溫度、濕度、火警、煙霧以及障礙物距離等參數的數據采集,并且通過無線藍牙模塊與上位機進行了良好通信。巡邏車移動性強,能夠實時動態采集數據,具有數據傳輸穩定的特點。
本文引用地址:http://www.j9360.com/article/201610/306609.htm1 引言
隨著計算機技術和信息技術在各個領域的快速發展、極大的促進了智能機器人的研究,其中智能移動機器人占有重要地位、移動機器人能完成人類在生產生活當中不能完成的任務,可以替代人類完成一些特殊的任務,同時在生產生活及軍事等領域不僅需要能自動控制的機器人,同時也需要具有數據采集,能隨時進行自動與手動等模式切換的智能移動機器人。
智能巡邏車屬于移動機器人的一種,利用藍牙傳輸無線數據,具有穩定性強的特點,經過測試在空曠地可在20m范圍內對巡邏車進行數據的傳輸、在自動、遙控、尋跡三種模式下可隨時切換并可以在各個模式下選擇手動單個數據或自動進行所有數據的動態采集(可用上位機調周期),上位機項目組采用Visual Basic進行開發、與巡邏車兼容性強、數據傳輸穩定,巡邏車可用于工業環境中的多點數據采集、靈活壁障,及火災現場探測,危險氣體泄漏現場勘查等自然災害。
2 系統硬件設計
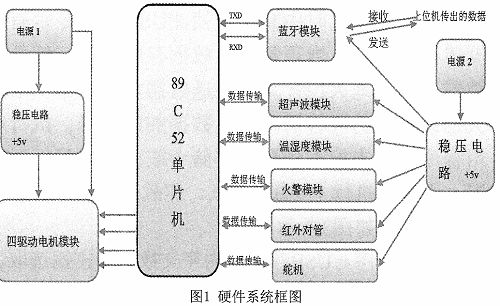
本智能巡邏車以C89c51單片機作為核心,硬件系統框圖如圖1所示,在惡劣的環境中巡邏車的穩定性是非常重要的前提,所以巡邏車用四輪驅動(單片機同時控制四個直流電機)的方式作為底盤。巡邏車的結構分為兩個部分,分別是電腦上位機和硬件系統組裝小車,電腦上位機用于顯示小車所在的工作環境下傳回周邊的環境參數及控制巡邏車的工作,保證實時的對工作環境進行檢測,巡邏車能用于在人為無法工作環境下工作。
2.1 電機驅動模塊
驅動電路核心芯片L298N可以實現電機正反轉調速,啟動性能好,工作電壓高,啟動轉矩大,可同時驅動兩個電機等特點,內含兩個H橋的高電壓大電流全橋式驅動器,可以驅動兩臺直流電機。根據L298M芯片的原理設計智能巡邏小車驅動模塊。L298M的四個輸入接口的高低電平控制電機的正轉和反轉,以及調節占空比來控制電機的轉速。
2.2 電路穩壓模塊
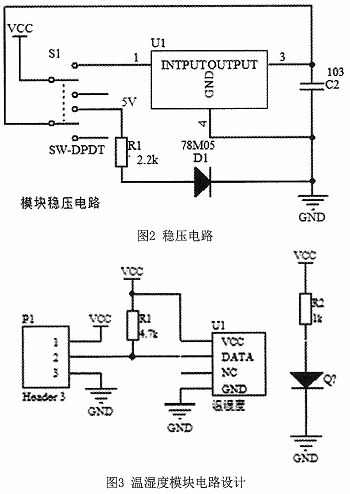
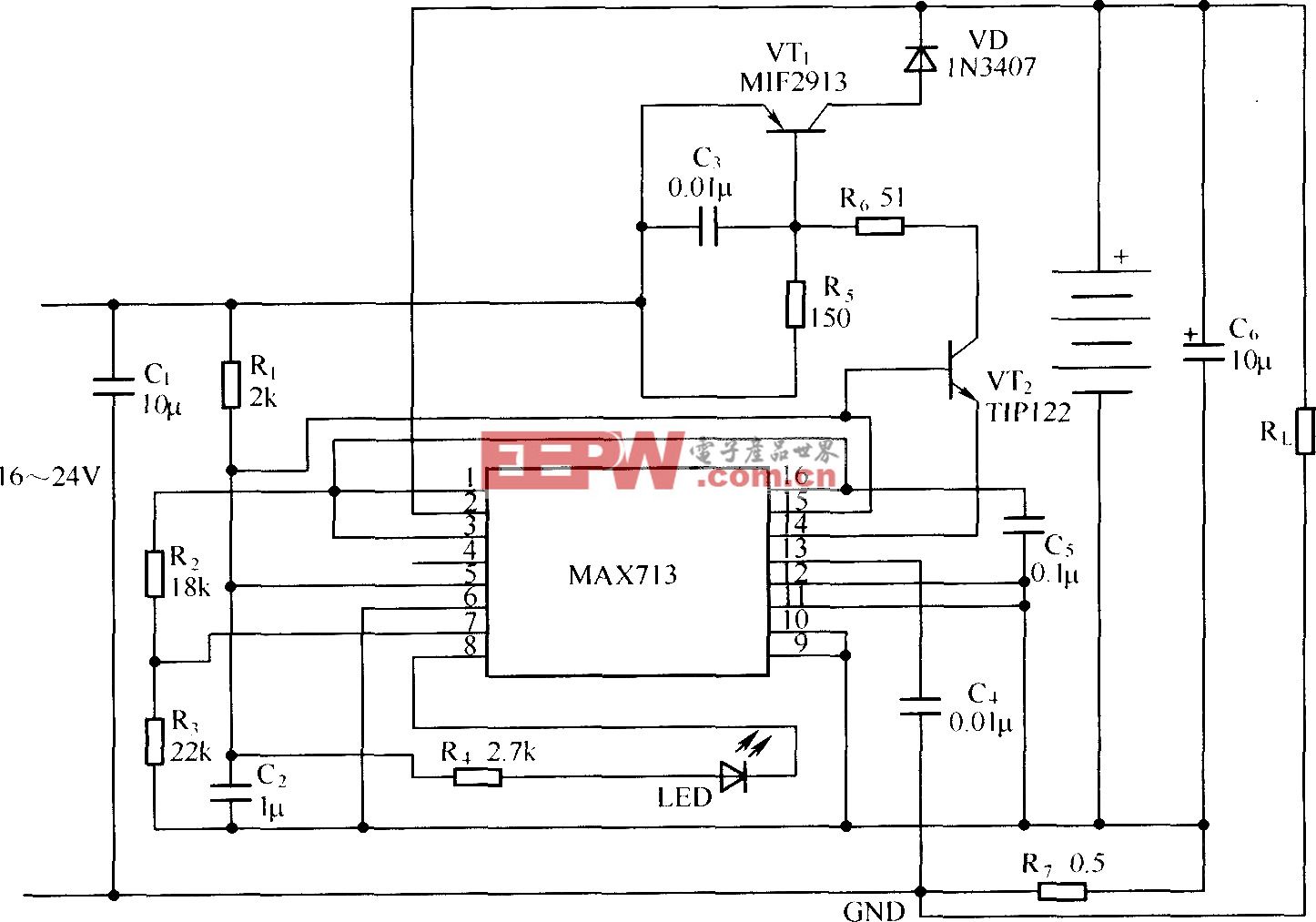
電源管理是智能車設計中的重要環節,它給系統的各個模塊進行供電,可靠的電源設計是整個硬件電路穩定運行的基礎。為保證電機驅動和最小系統的正常工作,必須得加一個穩壓電路,采用的是78M05貼片芯片,基本上能滿足89C52單片機和L298N芯片的基本要求。其原理圖如圖2示。
2.3 溫濕度模塊
溫濕度模塊是測量工作環境溫度和濕度的模塊,通過單片機實時返回數據。其原理圖設計如圖3示。
2.4 紅外對管模塊
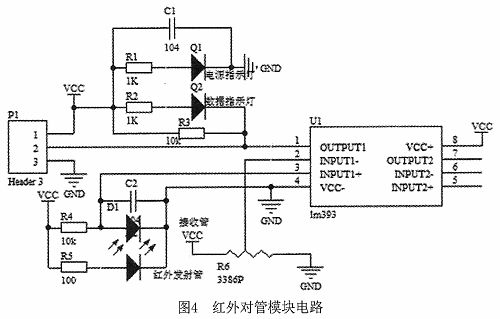
紅外對管模塊是用于巡邏車切換在尋跡模式下進行工作,當巡邏車在軌跡之外時,可以自己尋找軌跡,當找到軌跡時可以自動進入軌跡,其設計原理圖如圖4。
2.5 超聲波模塊
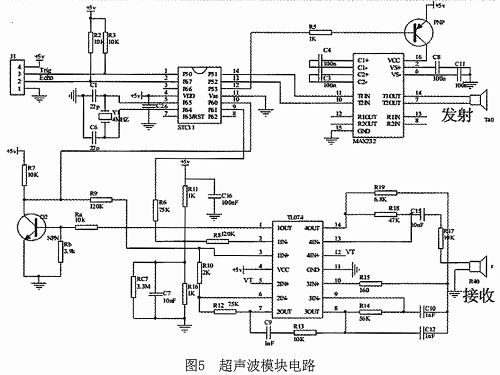
超聲波的功能主要分為兩個部分,分別是自動測距模塊和壁障。用戶可以根據想要的功能進行各種模式的切換。切換到自動模式時,超聲波主要用于壁障,也可測距,切換為手動模式時,超聲波主要用于數據的采集。此模塊與單片機實時的進行數據傳輸和通信。其原理圖如圖5所示。
3 軟件設計
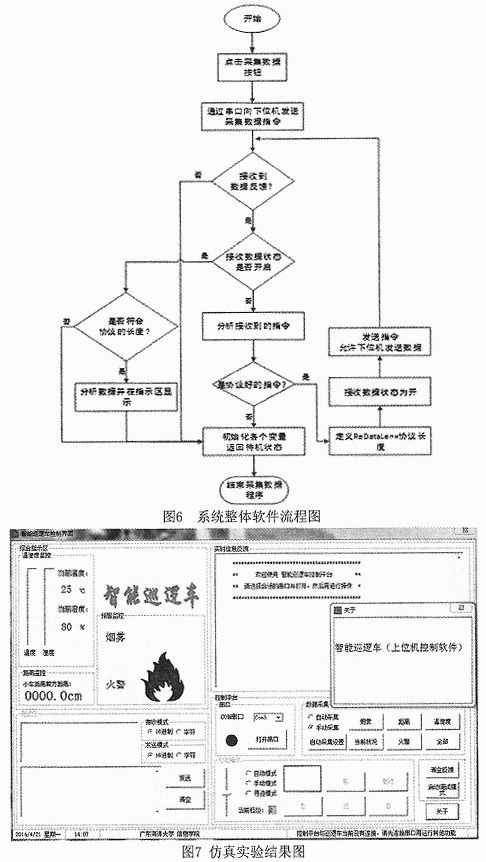
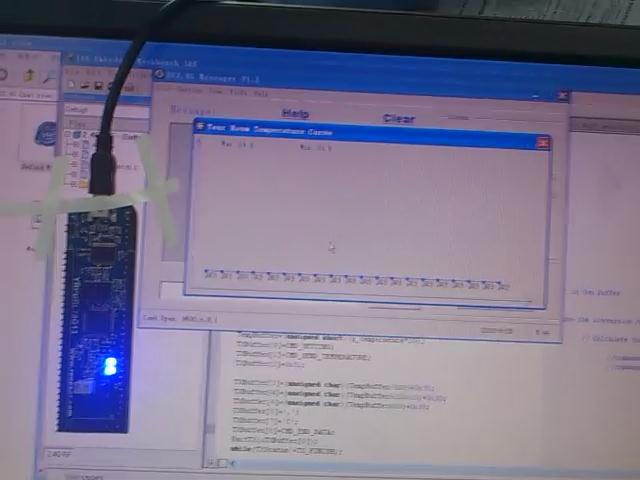
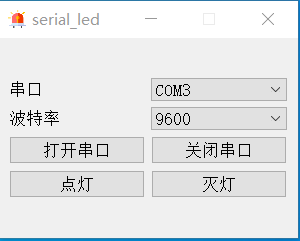
Visusal Basic(VB)是一種可視化的編程語言,具有易學易用的優點,在小型軟件設計方面具有較大的優勢,本設計采用VB開發上位機作為巡邏車的控制平臺,用計算機對車進行數據的采集,該上位機軟件能將所有數據動態顯示在整屏上,顯示小車所在的工作環境并傳回周邊的環境參數及控制巡邏車的工作。首先初始化模塊,選擇通信端口,打開串行口,鏈接成功即上位機進入工作狀態,則打開串口程序結束。系統軟件數據采集流程圖如圖6所示,仿真實驗結果圖如圖7所示。
5 結論
本巡邏車基于單片機實現自動、遙控、尋跡模式的切換,并且在三種模式下都能各自進行手動和自動的方式進行距離、溫濕度、煙霧火焰等數據的采集,巡邏車能夠在特殊環境下代替人完成不能完成的任務,具有采集數據與移動一體的靈活特性。



評論