dsPIC30F6010雙閉環矢量法在電機控制中的應用

摘要:基于dsPIC30F6010芯片,采用全數字雙閉環矢量法控制三相交流異步電動機,研究找出實現三相交流異步電機控制的實用方法。實驗結果表明,電機起動快速、運行平穩,具有較寬的調速范圍,精度較高,當測量轉速達到1000 r/min以上時,轉速精度小于等于0.8%,滿足了三相交流異步電動機的調速控制需求。
本文引用地址:http://www.j9360.com/article/201610/306578.htm引言
長期以來,交流異步電動機的調速是一個難題。直到20世紀70年代,由于計算機的產生,以及新型快速電力電子元件的出現,才使得交流異步電動機的調速成為可能。交流電機變頻調速是當今節約電能、改善生產工藝流程、提高產品質量以及改善運行環境的一種重要手段。
以兼具單片機控制性能強、價格低廉的特點和DSP運算優點的dsPIC30F6010作為控制芯片,采用全數字雙閉環矢量法控制三相交流異步電動機,是目前開發研究的熱點,對變頻器的改進和三相交流異步電動機的控制具有一定的參考價值。
1 三相交流異步電動機的數學模型
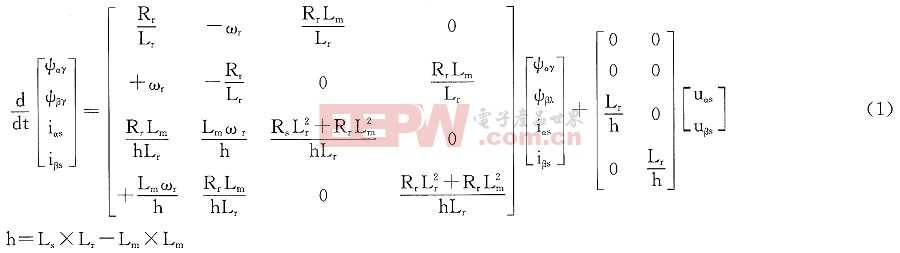
在靜止α、β坐標系統中,異步電機狀態方程為:
其中:Rs為定子繞組電阻;P為微分算子;Rr為轉子繞組電阻;Ls為α軸定子和轉子繞組等效電感;ωr為轉子角速度;Lr為β軸定子和轉子繞組等效電感;Lm為α、β坐標系統中定子與轉子間同軸等效繞組間的互感。
電機的電磁轉矩方程為:

因此,檢測兩相電流iα與iβ可以根據矩陣表達式(4)計算定子靜止兩相電流分量iα與iβ,稱為Clarke變換。相反,如果已經知道定子靜止兩相電流分量iα與iβ,那么就可以進行Clarke逆變換。
2 控制系統硬件結構設計
開發板采用美國微芯公司的dsPICDEM 1.1電機開發板,如圖1所示。主芯片是dsPIC30F6010,具有液晶顯示模塊;A/D轉換功能接口;LED、開關、按鍵、電位器和溫度傳感器;編碼器接口;RS232串口;捕捉接口;RS485端口;晶振為7.372 8 MHz;支持MPLAB ICD2和MPLAB ICE 4000仿真器,配套IDE軟件開發環境。
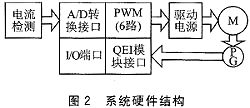
系統硬件結構如圖2所示。速度傳感器用來檢測速度;控制器是用來接收檢測的定子電流信號和速度信號,發出PWM信號;驅動電源用來檢測定子電流信號、做交-直-交的變換來控制電機。
3 控制系統的軟件設計
3.1 開環控制結構設計
通過dsPIC30F6010的軟件,設定載波頻率為10~20kHz(這個頻率段正弦逼近程度是最好的,而且在IPM開關頻率之內),該控制器的MCPWM模塊的三對PWM口(H為高端接IGBT的上橋臂,L為低端接IGBT的下橋臂),采用中心對齊模式發出PWM控制信號(該配置將在每一個周期內產生兩個線一線脈沖,有效開關頻率加倍,紋波電流減小,同時并未增加功率器件的開關損耗)。通過死區寄存/4,所以4倍頻PLL 后,Fcy=Fosc)。
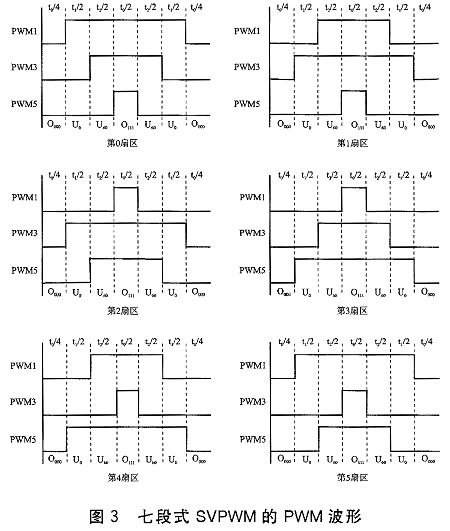
啟動采用SVPWM開環控制。本文選用七段式電壓空間矢量PWM波形,由3段零矢量和4段相鄰的兩個非零矢量組成,3段零矢量分別位于PWM波的開始、中間和結尾。其中每個扇區Ux、Ux±60的選擇順序為第0扇區,Ux=U0、Ux±60=U60;在第1扇區,Ux=U120、Ux±60=U60;在第 2扇區,Ux=U120、Ux±60=U180;在第3扇區,Ux=U240、Ux±60=U180;在第4扇區,Ux=U240、 Ux±60=U300;在第5扇區,Ux=U0、Ux±60=U300。七段式SVPWM的PWM波形如圖3所示。
3.2 閉環控制結構設計
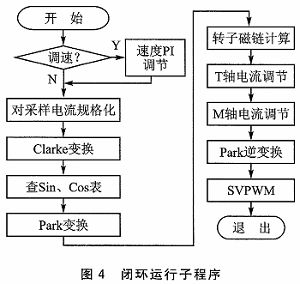
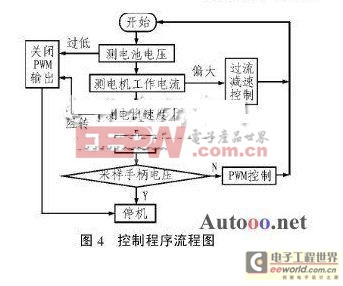
閉環子程序用來完成矢量雙閉環控制程序流程如圖4所示。
4 實驗研究
實驗用的是YS-7124系列鼠籠式三相交流異步電動機,其中功率為370 W,額定電流為1.94/1.12 A,額定電壓為220/380V,額定頻率為50Hz,額定轉速為1400r/min,效率為69.5%,功率因數為0.72,堵轉轉矩/額定轉矩為2.4,堵轉電流/額定電流為6,最大轉矩/額定轉矩為2.4。
4.1 開環實驗
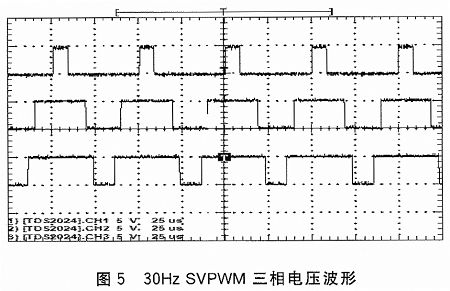
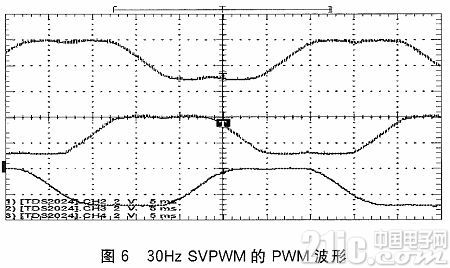
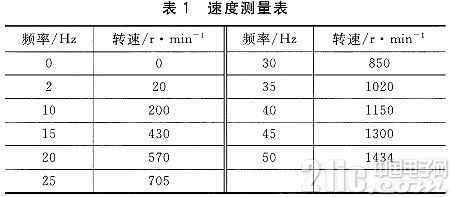
從圖5和圖6中可以看出,每兩相電壓的相位差是120°。從表1中可以看出,電機從2Hz開始轉動,在10Hz以后速度接近理論值,在達到額定頻率時轉速略高于額定轉速1400r /min。電機在低頻下運行不穩定的原因在于頻率較低時,電壓下降過大,造成臨界轉矩下降。與硬件設備相同的(本試驗設備),調制度為1時的5 Hz開始轉動的SPWM控制相比,前者的電壓利用率要高。對于角接三相異步電機,驅動電源外接220 V交流電,當SPWM調制度為1時,相電壓的有效值最大為110V,角接相電壓等于線電壓。實際測得SVPWM在50 Hz下的電壓是120 V。SVPWM的電壓利用率比SPWM高,調速范圍寬,證明矢量控制采用SVPWM技術具有優越性。
電機的速度在25個PWM周期(2.5 ms)調節一次,啟動運行時間大約為0.6 s(可根據要求調整),實驗圖形表明:上升時間tr大約在0.11 s,峰值時間tp在0.6 s左右,超調量Mp大約為12%,有3次振蕩,調整時間ts為0.84 s左右,在1000 r/min穩定時最大誤差為1.5%。
4. 2 閉環實驗
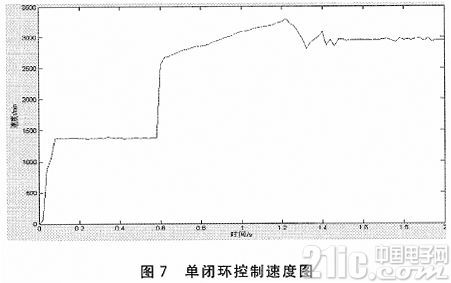
單閉環控制速度圖如圖7所示,矢量控制轉速圖形如圖8所示。
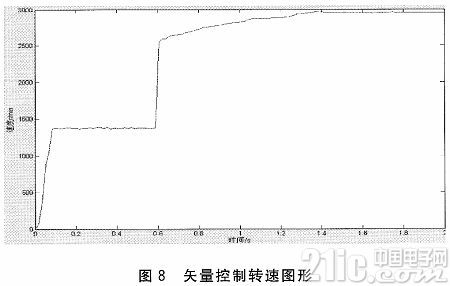
從矢量的實驗現象可以看出,電機在空載的條件下,調速范圍較寬,能達到50~1400 r/min,系統能夠快速、穩定地達到設定值,整個系統能很好地實現電機的正轉、停止、反轉等功能。
可以看出,矢量控制雙閉環的速度波動比啟動運行時的電機速度波動要小,而且在同一PI調節參數下,速度調節要比單閉環更平穩。
電機的速度在25個PWM周期(2.5 ms)調節一次,啟動運行時間大約為0.6 s(可根據要求調整),上升時間tr大約在0.3 s,峰值時間tp在0.8 s左右,超調量Mp非常小,大約為0.1%,幾乎無振蕩,調整時間ts為0.84 s左右,電流變化也較小,并且穩定后接近正弦波形,矢量控制電機運行非常穩定,因編碼器干擾等原因速度值存在2%以下的誤差(50~1400 r/min)。對比單純的SVPWM開環控制在1000 r/min的誤差2%,單閉環的1.5%,矢量雙閉環控制系統在1000 r/min時,實際最大誤差僅為0.8%,而且雙閉環的超調量要遠遠小于單閉環,且無振蕩。dsPIC30F6010指令多為單周期指令,所以運行速度也快,從而可以看出本控制系統的優越性。
結語
通過研究,驗證了dsPIC30F6010應用在電機控制上的可靠性和優越性,找到了一種適用于三相交流異步電動機全數字、高性能的通用方法。從實驗結果可以看出,這種基于dsPIC30F6010的三相交流異步電動機的控制系統在交流調速和制作變頻器方面具有一定參考價值。




評論