基于ZigBee技術的飛行保障工具管理系統

摘要 為了實現航空兵部隊日常飛行保障中對維護工具進行遠程實時精確管理的目的,設計了一套基于ZigBee無線傳感網絡和條碼技術的工具實時管理系統。該系統由終端數據采集系統、ZigBee無線傳感網絡和上位機監控端3部分組成。系統完成了條碼槍對工具條形碼的采集和無線傳感網絡對數據的傳輸,PC端建立數據庫和上位機應用程序實現了數據處理和人機交互。此外系統還實現了對維護現場工具的實時管理,提高了工作效率,杜絕了人為差錯的發生,對飛行安全保障具有重要意義。
本文引用地址:http://www.j9360.com/article/201610/306328.htm在航空兵部隊飛行保障中,對工具的管理非常重要,嚴防將維護工具遺漏在飛機內部,對飛行安全保障十分關鍵。每架飛機所對應的工具都是獨一無二的,工具箱跟隨飛機的位置移動,目前是人工對工具箱中的工具數量和種類進行清點確認,在保證數量和種類準確無誤的情況下才能對飛機進行相關作業。現有工作模式由于工具種類繁多,人工效率低下且存在人為誤判的情況,這將對飛行安全造成嚴重隱患;同時每天需要去工具房借還工具,工作量較大。為解決上述問題,本文設計了一種基于ZigBee無線傳感網絡的遠程工具管理系統。系統實現了通過條碼槍對工具出入工具箱條形碼的數據采集,并通過建立ZigBee無線通信網絡將條形碼數據傳輸到PC端數據庫,在PC端進行數據處理,通過可視化界面對處理結果進行顯示,并將每個工具箱的數據處理結果發回現場終端設備顯示,實現遠程對每架飛機工具的精確、實時管理,并將結果反饋給現場工作人員,實現了各類人員對數據的共享。本系統有效地解決了現有工作模式下監管不到位、存在人為差錯隱患、工作程序繁瑣的弊端;既保證了安全又提高了工作效率,對探索飛行安全保障模式具有重要意義。
1 系統總體設計
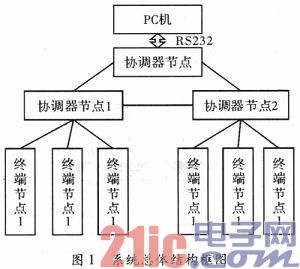
系統功能主要分為3部分:(1)實現單個工具箱(ZigBee終端節點)的工具出庫入庫時工具條形碼的采集。(2)ZigBee無線傳感網絡的建立,將各終端節點采集的數據實時上傳到協調器點,并進行協調器點和終端節點的數據交換。(3)在PC端,通過RS232串口接收協調器節點的數據,通過建立的數據庫進行數據處理,實現對處理結果的可視化顯示并將處理結果反饋給各個終端節點。
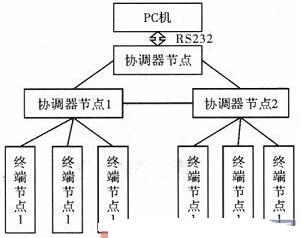
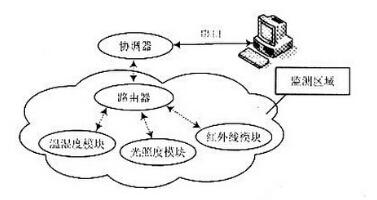
整個工具管理系統的無線監測網絡由終端節點、匯聚節點、監控中心組成。系統采用Z—Stack協議構建無線傳感器網絡;各個終端節點分別執行工具條碼的采集、信息的處理和數據的傳輸;匯聚節點包括路由器和協調器,路由器負責數據的收集與轉發,協調器作為網關節點,主要負責網絡組建、維護、控制終端節點的加入,通過RS232串口與監控主機實現數據的交互;在監控中心通過建立數據庫并對數據進行處理從而實時管理整個網絡區域內各終端節點的工具運轉。在ZigBee協議的3種拓撲結構中,本文選用樹形網絡,樹形網絡比最簡單的星形網絡拓撲網絡規模大,同時比網狀拓撲所需資源小,系統結構框圖如圖1所示。
2 硬件設計
系統硬件電路的設計主要包括終端節點和協調器節點的硬件設計。終端節點主要負責工具條碼數據的出入庫管理、狀態顯示、數據的無線發送和接收等任務,并能以自組織的方式加入網絡,是整個硬件的核心;而匯聚節點包括路由器節點和協調器節點,路由器節點主要負責數據的路由;協調器節點主要負責和PC端上位機程序的數據通信,接收路由器的數據通過串口輸出到PC機,通過串口接收PC端處理后的數據,通過無線傳感網絡傳輸到各個終端節點,同時負責無線網絡的建立和維護。
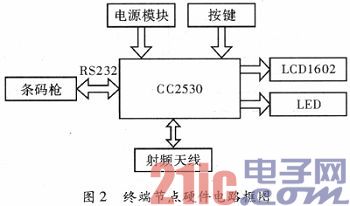
系統的終端節點由CC2530核心模塊、數據采集模塊、狀態顯示模塊和按鍵模塊組成。終端節點的硬件框圖如圖2所示。
2.1 CC2530核心模塊電路
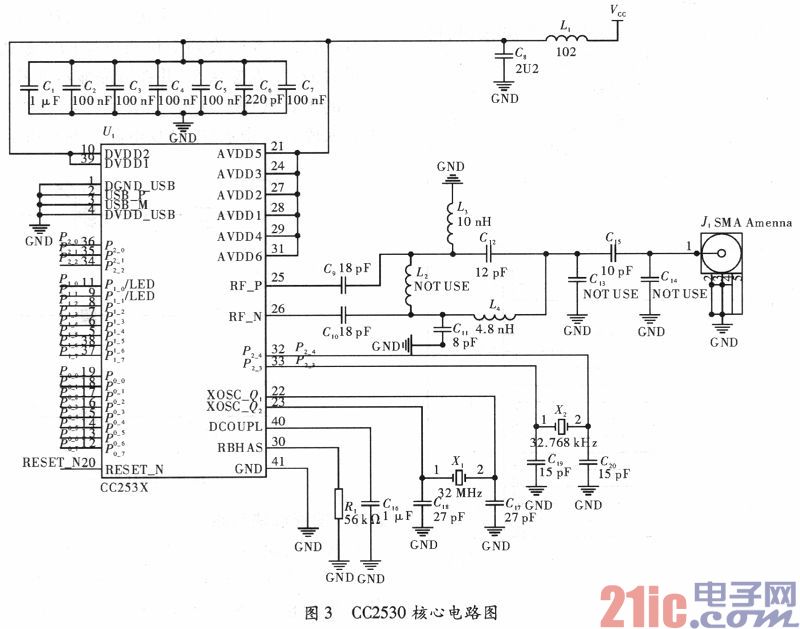
CC2530芯片是ZigBee新一代SoC芯片片上系統解決方案,其能夠以較低的總材料成本建立強大的網絡節點。CC2530集成了RF收發器、增強工業標準的8051MCU,可編程Flash存儲器,8 kB RAM等。圖3所示為CC2530核心電路圖,主要包括電源電路部分、晶振電路和射頻電路3部分。
2.2 數據采集模塊電路
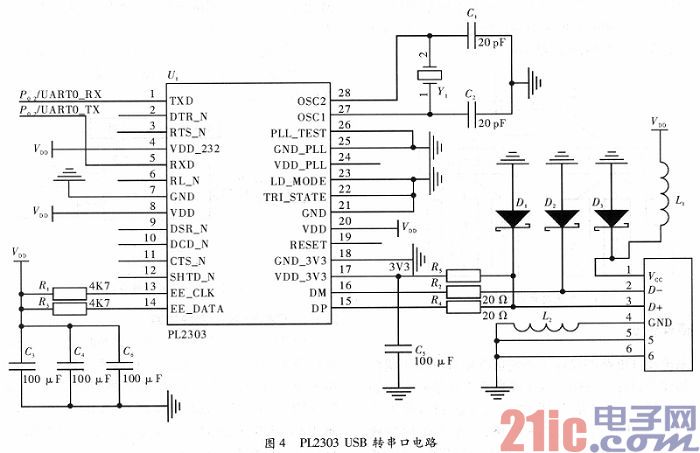
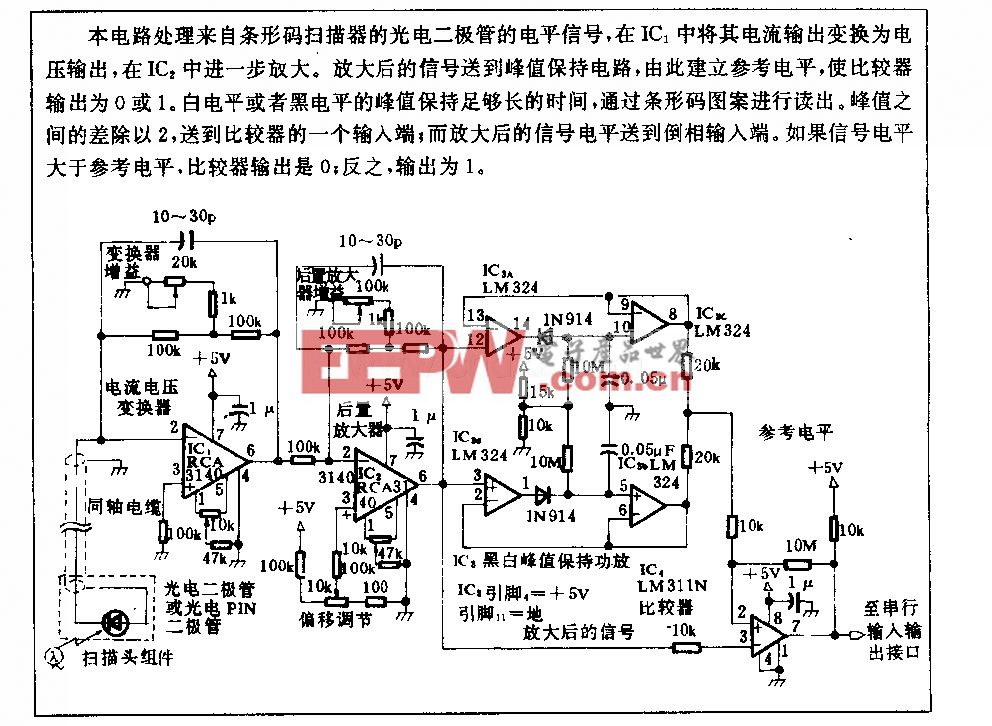
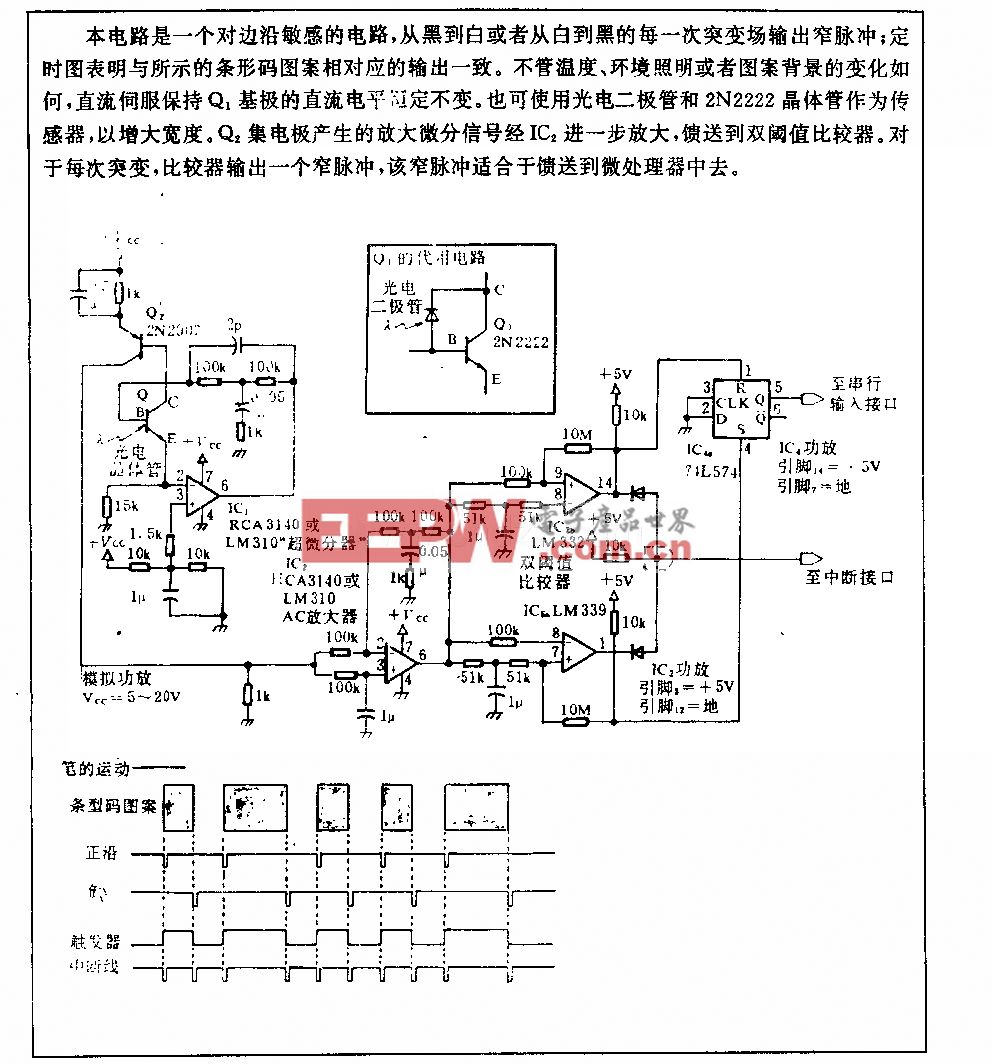
在終端節點中,條形碼掃描槍負責對工具條形碼出入工具箱的數據進行采集,通過RS232串口通信將數據傳輸給CC2530,CC2530模塊再將條碼數據進行處理后通過無線傳感網絡傳輸給上位機。圖4為系統的USB轉串口電路圖。
2.3 狀態顯示模塊電路
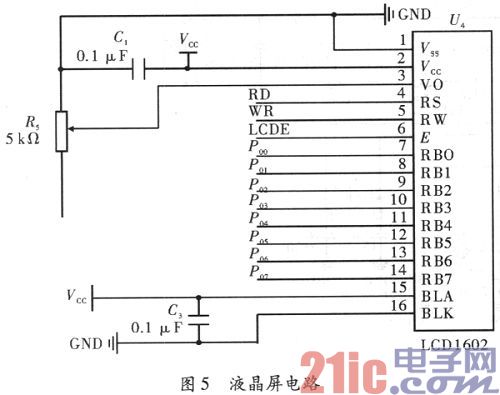
液晶屏采用LCD1602,具有標準的16腳接口,可顯示漢字、英文和圖形。常用的指令集有:清屏指令、輸入方式設置指令、顯示開關控制指令、光標位移指令、功能設置指令、寫數據指令等。液晶屏用于顯示工具狀態信息,工具全部歸還時顯示為OK,工具缺失是現實缺失的數量和工具代碼。液晶屏電路如圖5所示。
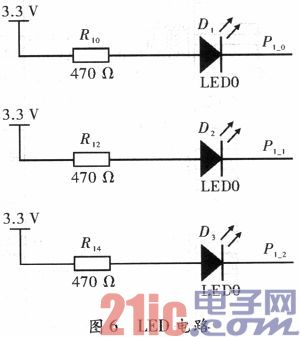
LED用于系統的工作狀態顯示,D1為系統報警指示燈,終端節點接收到上位機反饋的信息為工具數量不足時D1為閃爍狀態,并在液晶顯示屏幕上顯示具體確實的工具代碼。D2為工具出庫狀態指示燈,D3為工具入庫狀態指示燈,LED電路如圖6所示。
2.4 按鍵模塊電路
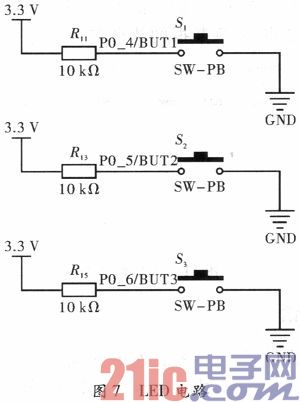
按鍵模塊用于系統的工作模式的控制,本系統設計了3個單獨的按鍵。S1為系統啟動按鈕,S2為入庫狀態切換按鈕,S3為出庫狀態切換按鈕,按鍵電路如圖7所示。
3 系統軟件
軟件部分的設計是在硬件網絡節點的基礎上,通過Z—Stack協議棧實現組網,然后通過ZigBee無線傳感網絡來完成數據的傳送。終端節點采集工具條碼數據,通過構建的無線傳感網絡將各終端節點的數據傳輸給PC端;PC端通過將接收的數據經過數據處理后得出結果,再將結果通過無線傳感網絡反饋給相對應的終端節點,并在PC端進行可視化顯示;PC端上位機軟件實現了人機交互功能,便于遠程對現場狀態進行管理。
3.1 構建無線傳感網絡
無線傳感器網絡中節點的工作有組網與數據轉發兩個階段。程序設計采用TI公司最新的符合ZigBee2007規范的Z-Stack協議棧。Z—Stack是德州儀器推出的ZigBee協議棧軟件,為應用開發者提供了一個模板,在其基礎上進行開發可大幅加快應用開發周期。
Z—Stack采用操作系統的思想來構建,采用事件輪詢機制。系統按照任務優先級依次處理事件,而在事件處理完后,進入低功耗模式,降低了系統功耗。操作系統抽象層(OSAL)的工作就是對多個任務進行系統資源分配,核心是通過參數傳遞的事件類型來判斷對應處理相應任務的事件。在系統中,定義Taskevents數組存放每個任務的標志位,在OS主體循環函數中,輪詢判斷各任務標志位來對應執行相應的任務。進而執行事件處理函數,完成任務事件處理。
在進行應用開始時,需要定義添加相應的任務。其中主要包括任務初始化函數和事件處理函數。任務初始化函數定義一個TasksArr數組,存放所有任務事件處理函數的地址。給每個任務分配唯一的任務標識號,最后注冊系統服務。Z—Stack協議棧中按照由高到低的優先級已經定義好了MAC層、網絡層、硬件驅動抽象層、應用設備對象層的任務,只需添加用戶應用層任務初始化函數到后面即可。
ZigBee無線傳感器網絡在布設之后,協調器首先建立網絡,所用信道和PAN ID應防止與其他網絡有沖突;建立網絡后,協調器處于網絡監聽狀態,當有終端節點請求加入網絡時,協調器為終端節點分配網絡地址并建立鄰居列表,之后向終端節點發送入網確認信息,連接成功。設計中,終端節點可以尋找最佳路由,實現網絡多跳功能,最后通過路由器發送數據給協調器。
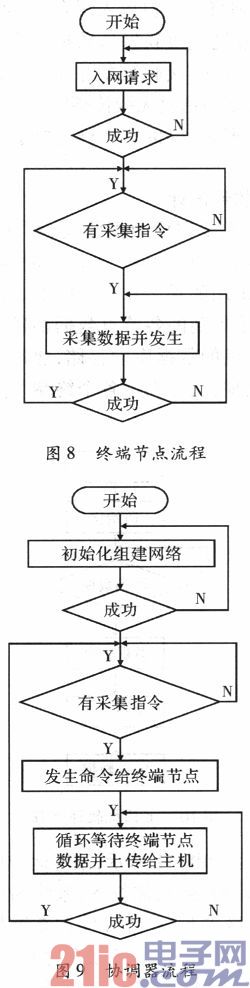
3.2 ZigBee終端節點軟件設計
CC2530是基于8051 MCU的SOC芯片,數據傳輸采中將每次發送的數據打包成一個128位的數據包,其中包頭為校驗碼55,包尾校驗碼為AA,接收端收到數據后將數據包解析,并判斷包頭包尾是否為“55”和“AA”,若是,則將數據包放入緩存中;如果不是,則返回掉包信息,發送端重新發送數據。終端節點軟件分為采集數據并發送、接收數據并顯示兩部分。通過串口采集數據打包后通過無線傳感網絡發送。接收協調器發送來的數據后,解析后將符合要求的數據在LCD上顯示。
3.3 上位機軟件設計
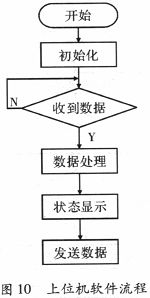
監控中心主要完成數據收發、存儲、處理以及顯示,軟件框圖如圖10所示。上位機的界面是采用VB編寫,數據庫采用的是SQL。監控中心是本系統的核心部分,終端采集到的各節點數據都通過無線傳感網絡傳輸到上位機的數據庫中存儲,通過系統程序對數據進行比對處理,從而判定各個終端節點的工具是否全部在位。
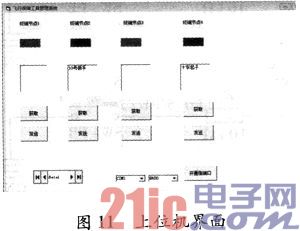
上位機界面如圖11所示,系統運行后打開通信端口按鍵,選擇串行端口、波特率,系統則自動接收協調器通過串口發送的數據,并存儲在系統數據庫中。當操作人員按下獲取按鈕時,系統程序將反饋出結論:當工具全部歸還時,對應的終端節點顯示為綠色;當工具未全部歸還時顯示為紅色,并在下方文本框中顯示所缺工具型號。按下發送按鈕時,則將工具狀態發送給相應終端節點,實現數據的共享交互。
4 結束語
系統設計了一套基于ZigBee技術的飛行保障工具管理系統,有效解決了對現場監管不到位、實際工作中人為差錯等問題。通過系統測試,無線傳感網絡數據傳輸穩定可靠,能夠有效地監控飛行保障現場終端工具使用情況,對探索航空兵部隊對飛行保證中工具進行安全高效的管理提供了一套切實可行的方案。



評論