基于STM32的車輛遇險遠程報警系統設計

0 引言
本文引用地址:http://www.j9360.com/article/201610/306321.htm近年來,隨著國民收入的不斷提高,汽車已經進入普通家庭。汽車給人們出行帶來便捷,同時也給人們帶來了“麻煩”。公安部統計數據顯示,2012年全年,全國接報涉及人員傷亡的交通事故4.6萬起,造成1.1萬人死亡。當發生事故后,駕乘人員可能失去意識不能自行報警求救,而且報警人由于心理緊張或害怕不能夠清楚說出事故地點以至于
耽誤救援時間。目前我國傳統的車輛報警系統一般僅用于防盜方面,并未考慮到發生事故時車輛與外界的通信問題,因此不能夠為駕乘人員提供足夠的安全保障。基于上述因素,設計了一種車輛遇險遠程報警系統,用來幫助救援部門及時趕到事故地點展開救援,從而提高遇險人員的生存系數。
1 系統總體設計
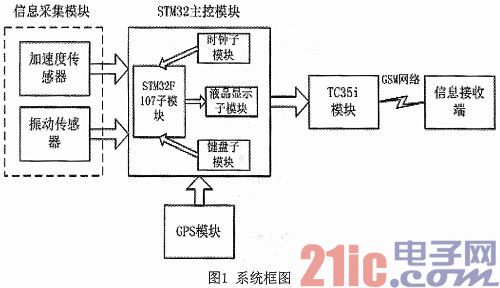
本系統主要由STM32主控模塊、GPS模塊、信息采集模塊和TC35i模塊組成。GPS模塊負責確定車輛所在位置的經緯度信息;信息采集模塊主要負責采集車輛的加速度和振動信息;STM32主控模塊接收信息來判斷是否發生事故并由液晶顯示子模塊實時顯示車輛經緯度位置信息;TC35i模塊負責向接收端(救援部門)發送救援信息。其工作過程為信息采集模塊采集信息傳送到STM32主控模塊確定車輛是否發生碰撞,若發生碰撞則由GPS模塊來確定車輛經緯度,再由TC35i模塊通過GSM網絡向救援部門發送車輛所在位置的經緯度。
本系統利用了GPS和GSM。GPS是全球定位系統的簡稱,能夠為用戶提供準確的位置信息。GSM是全球移動通信系統的縮寫,是我國規模最大、性能最穩定的通信網絡,能夠實現全國聯網和漫游,為GSM的各種應用奠定了堅實的基礎。
本系統框圖如圖1所示。
2 系統硬件設計
2.1 STM32主控模塊
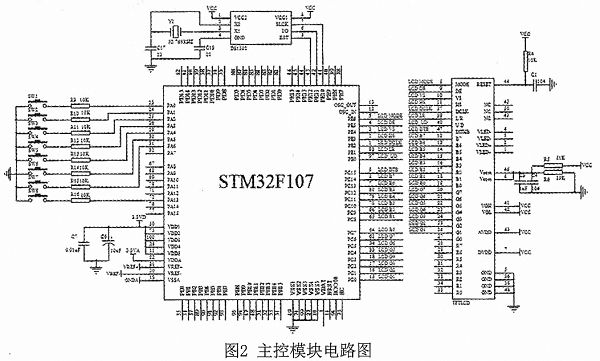
STM32主控模塊主要由STM32F107子模塊、時鐘子模塊、鍵盤子模塊和液晶顯示子模塊組成。時鐘子模塊選用的是DS1302,采用串行數據傳輸方式。鍵盤子模塊采用2×4鍵盤,用于調節時鐘和功能設定(如一鍵求助功能)。液晶顯示子模塊采用TFTLCD,能夠滿足顯示車輛經緯度位置和時間的要求。主控模塊電路圖如圖2所示。
2.2 GPS模塊
采用型號為ATK—NEO一6M的GPS模塊來確定車輛實時經緯度信息。該模塊同外部設備的通信接口采用UART方式,輸出的GPS定位數據采用NMEA-0183協議,NMEA-0183是美國國家海洋電子協會為統一海洋導航規范而制定的標準,該格式標準已經成為國際通用的一種格式。
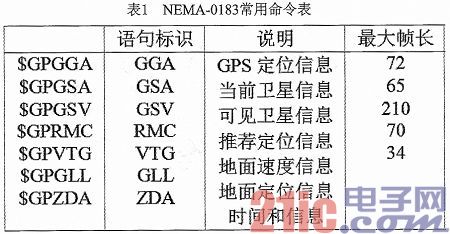
NEMA-0183協議采用ASC II碼來傳遞GPS定位信息,稱之為幀。幀格式形如$aaccc,ddd,ddd,…ddd*hh(CR)(LF),各符號意義為:$為幀命令起始位;aaccc為地址域,前兩位為識別符(aa),后三位為語句名(ccc);ddd…ddd表示數據;“*”為校驗和前綴;hh表示校驗和。常用命令如表1所示。
每一幀最后都有一個“hh”的校驗和,該校驗和是通過計算“$”與“*”之間所有字符ASC II碼的異或運算得到。例如語句$GPZDA,
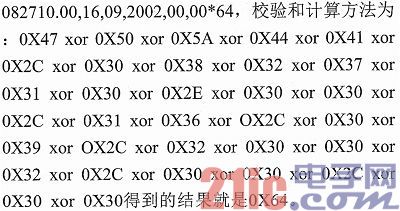
通過編寫單片機代碼,解析NEMA-0183數據,從而得到GPS定位信息。
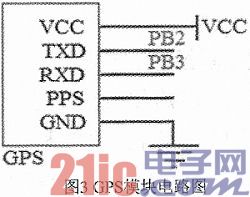
GPS模塊電路圖如圖3所示。
2.3 信息采集模塊
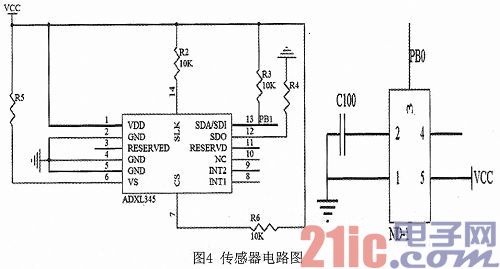
信息采集模塊是由加速度傳感器子模塊和振動傳感器子模塊組成。加速度傳感器子模塊選用ADXL345傳感器,該傳感器是ADI公司于2008年推出的具有SPI和I2C數字輸出功能的三軸加速度計,能夠檢測出設備是否處于運動狀態,并能測出設備的某一軸向加速度。振動傳感器子模塊選用ND-1型傳感器,放置在汽車前部和尾部,以便能夠更好地檢測出車輛異常振動信息,該傳感器有5個引腳,1~5引腳分別接負極、靈敏度設定、輸出、延時設定和電源正極。傳感器電路如圖4所示。
2.4 TC35i模塊
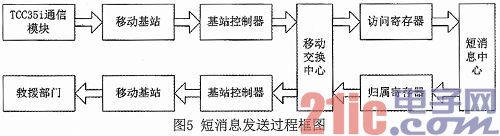
TC35i模塊負責本系統與外界的通信。該模塊能夠將系統要發送的信息及時、準確地發送到信息接收端。這里采用西門子公司生產的TC35i模塊,其通過RS232串口線與STM32主控模塊進行通信,主控模塊通過AT指令來控制TC35i模塊的短信發送和接收。主控模塊接收到信息采集模塊發來的信息并判斷車輛是否發生翻滾或撞擊。如果車輛發生翻滾或撞擊,則TC35i模塊將由GPS模塊接收到的經緯度信息通過GSM網絡發送到救援部門。短消息發送過程框圖如圖5所示。
3 系統軟件設計
3.1 信息采集處理程序設計
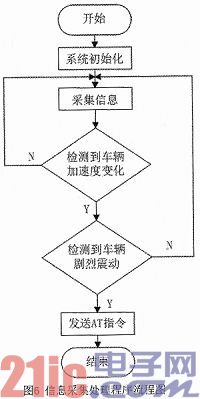
系統啟動后,初始化硬件設備,信息采集模塊開始采集車輛信息(車輛加速度和振動信息),當系統判定車輛發生異常時,STM32主控模塊通過RS232串口線給TC35i模塊發送AT指令,使其發送短信。信息采集處理程序流程圖如圖6所示。
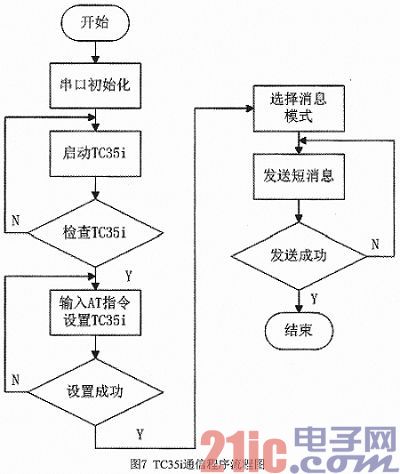
3.2 TC35i通信程序設計
當TC35i模塊接收到AT指令后,則將經緯度信息通過GSM網絡發送到信息接收端(救援部門),完成報警呼救功能。在沒有接收到報警指令之前,使TC35i模塊處于睡眠狀態,以降低系統功耗。其程序流程圖如圖7所示。
4 系統調試
系統調試主要包括信息采集模塊、GPS模塊和TC35i模塊的調試。
信息采集模塊調試包括加速度傳感器偏移校準和振動傳感器的振動靈敏度設置。ADXL345傳感器校準主要是采用多次檢測求平均值方法。
振動傳感器靈敏度設定是在引腳2接入一個可調電容實現的,通過調節電容實現傳感器靈敏度的調節。
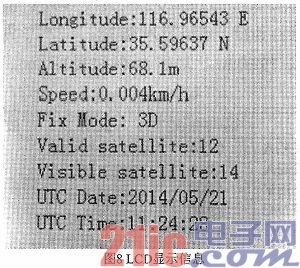
GPS模塊經過調試可以正常定位,LCD顯示經緯度信息如圖8所示。
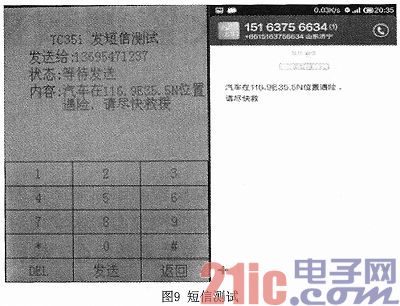
將信息發送端設定為15163756634,接收端設定為13695471237,經過調試,TC35i模塊正常工作。如圖9所示。
5 結語
基于STM32的車輛遇險遠程報警系統實現了車輛遇險時智能報警、請求救援的功能。系統采用STM32F107芯片控制,應用高性能的傳感器采集信息,最后由TC35i模塊通過GSM網絡發送信息至接收端。本系統具有功耗低、可靠性高、易于安裝等優點,提升了人們乘車的安全系數,具有廣泛的應用前景。
- STM32單片機中文官網
- STM32單片機官方開發工具
- STM32單片機參考設計











評論