ARM9的超高頻讀寫器基帶編解碼設計

摘要:根據超高頻RFID國際標準協議EPC GEN2中的規定,基于ARM9芯片S3C2440提出一種適用于超高頻讀寫器的PIE編碼以及MILLER2解碼的實現方式。設計中使用該芯片的PWM輸出進行編碼,并使用其外部中斷進行解碼。通過分析示波器捕捉到的MILLER2波形以及串口打印的解碼輸出,驗證了該設計的正確性。
關鍵詞:S3C2440;EPC GEN2協議;超高頻讀寫器;PIE編碼;MILLER2解碼
引言
普通的UHF讀寫器主控芯片使用FPGA較多,其優點是FPGA對時序邏輯處理速度快,使用HDL語言很容易實現協議的編碼與解碼,但FPGA芯片本身很少具備串口、網口等通信接口模塊,功能擴展較麻煩。由于ARM9芯片集成了很多擴展接口,同時進行操作系統移植等更高層次的設計也變得很容易,但對時序邏輯處理較難。因而本文提出了基于ARM9的UHF RFID讀寫器基帶編解碼方法,并加以實現。
1 基本原理
UHF RFID國際標準協議規定讀寫器到電子標簽的通信應采用DSB—ASK、SSB—ASK或者PR—ASK調制方式。本文使用ARM9芯片S3C2440的PWM(脈寬調制)控制模塊進行PIE編碼,通過編碼信號控制射頻開關實現OOK調制。電子標簽接收到命令后反向散射副載波應答,經過射頻模塊的天線接收后被解調電路還原成MILLER2數據。構造MILLER2解碼狀態機,使用S3C2440的外部中斷對MILLER2時序序列進行上升沿捕捉,捕捉到的兩次中斷的時間間隔作為狀態機輸入,進而解調出標簽反射回來的數據。系統的硬件框圖如圖1所示。
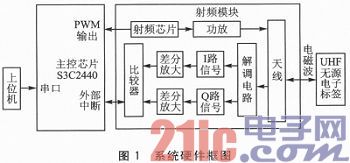
讀寫器射頻模塊的工作流程為:發送命令時,PIE編碼電平控制射頻芯片開關,當開關開啟時輸出射頻載波,關閉則不輸出,以達到OOK調制載波的目的。接收機采用零中頻接收機方案,直接對天線接收到的標簽反向散射信號進行解調,解調完畢得到相位相差90°的I、Q兩路信號,通過差分放大器放大處理后,輸出到比較器,經過比較后電路輸出MILLER2編碼時序信號。
2 PIE編碼
2.1 PIE碼簡介
EPC GNE2協議規定UHF讀卡器向標簽發送命令時,數據應采用PIE編碼。PIE碼通過高低電平的時間長度不同來規定數據是“1”還是“0”。協議使用Tari代表數據“0”,時間長度在6.25~25μs范圍內,容差為±1%,數據“1”的寬度在為1.5Tari~2.5Tari,如圖2所示。本次編碼中,Tari值為6.4μs,數據“1”的長度為11.4μs,PW的長度為3.2μs。

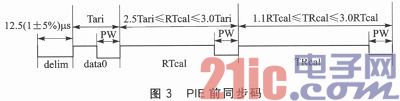
協議規定,完整的PIE碼需在有效數據前加上前同步碼或幀同步碼。前同步碼由定界符、Tari、RTcal以及TRcal這4段組成,用在Query命令上。幀同步碼省去了TRcal而直接由前三項組成,用在其他命令上。前同步碼示意如圖3所示。
2.2 PWM實現PIE編碼
S3C2440有5個16位的定時器,其中定時器1~4具有PWM(脈寬調制)功能,定時器使用經過分頻后的系統時鐘PCLK作為時鐘輸入。本設計中100 MHz的PCLK經過2分頻得到50 MHz頻率的定時器輸入時鐘,定時器每計數一次耗時0.02μs。定時器使用兩個16位的緩沖寄存器TCNTB和TCMPB來實現PWM功能,TCNTB為一次PWM輸出計數次數,采用遞減的方式計數,當計數減為TCMPB的時候,PWM輸出電平反轉。以數據“0”為例,其脈沖總寬度為6.4μs,低電平持續時間3.2 μs,則可計算出TCNTB=6.4/0.02=320次,TCMTB=3.2/0.02=160次。
為實現連續的PWM輸出,需要讓定時器工作在自動重載模式,即當定時器計數器減為0的時候,在定時器中斷處理函數里更新TCNTB及TCNMPB,讓定時器重新開始一次脈寬輸出。定時器1初始化時經過以下步驟:
①TCNMB以及TCMPB寄存器賦非零初值;
②TCON中人工裝載位配置為1,TCNTB和TCMPB更新到內部計數器;
③TCON中自動重載位配置為1,為實現連續的PWM功能;
④TCON中輸出翻轉位配置為1,脈沖以高電平開始;
⑤TCON置為啟動位;
⑥TCON設置關閉人工裝載,定時器開始啟動。







評論