基于C8051和μC/OS-Ⅱ的數控機床嵌入式執行控制器

在數控機床系統中,功能模塊可分為兩大部分:一部分是實時性要求不高的功能,例如人機界面交互管理等;另一部分是實時性要求高的功能,主要有伺服控制、插補計算等。根據這一特點,該系統采用兩級控制結構,利用 IPC豐富的軟件資源,提供圖形化的人機交互環境;利用嵌入式執行控制器的高實時性和穩定性,實現快速、可靠的控制,充分發揮了二者的優點。兩級之間用串行口進行實時通信。本文主要介紹嵌入式執行控制器的實現。
本文引用地址:http://www.j9360.com/article/201609/303540.htm1 數控機床系統硬件結構
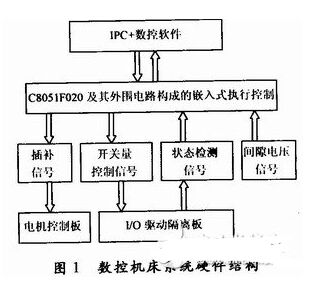
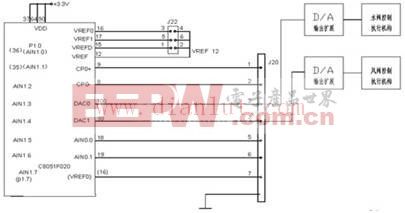
數控機床系統硬件結構如圖1所示,IPC作為上位機,安裝有專用軟件,實現人機交互;C8051020芯片及其外圍電路構成的嵌入式執行控制器作為下位機,負責實時、可靠的控制。執行控制器通過串行口接收上位機的命令信息(包括:插補命令、開關量控制命令),再將這些信息轉換成控制信號輸送給相應的執行部件。例如,將插補命令轉換成一連串的插補信號,輸送給電機控制部件;將開關量控制命令轉換成輸出信號,通過I/O驅動隔離接口板輸送給相應的開關控制器。執行控制器同時還有2個檢測任務:一個是刀具是否運動到各軸限位點的檢測,另一個是間隙電壓的檢測。這兩個信息將為運動時的自動調節控制提供依據。執行控制器還負責將運行中的狀態信息組裝成幀,實時地傳送給上位機。
2 μC/OS-Ⅱ在C8051F020($12.6125)上的移植
要使用μC/OS-Ⅱ,首先就必須把這個內核成功地移植到C805lF020上。μC/OS-Ⅱ的移植主要是對OS_CPU.H,OS_CPU_A.ASM和OS_CPU_ C.C三個文件進行修改,下面就具體的修改內容做介紹。
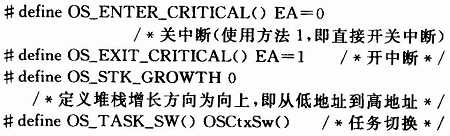
2.1 OS_CPU.H文件的修改
OS_CPU.H包括了用#define定義的與處理器相關的常量、宏和類型定義。其中,需要修改的部分如下:
2.2 OS_CPU_A.ASM文件的修改
該文件包含4個匯編語言函數。
(1)OSStartHighRdy()函數在多任務系統啟動函數OSStart()中調用。作用是設置系統運行標志位OSRunning=TRUE;將就緒表中最高優先級任務的棧指針Load到SP中,并強制中斷返回。
(2)OSCtxSw()函數是在任務級切換函數中調用的。作用是保存當前任務的環境變量,將當前SP存入任務TCB中,載入就緒最高優先級任務的SP,恢復就緒最高優先級任務的環境變量,中斷返回。這樣就完成了任務級的切換。
(3)OSIntCtxSw()在退出中斷服務函數OSIntExit()中調用。作用是實現中斷級任務切換。
(4)OSTicklSR()系統時鐘節拍中斷服務函數,其周期的大小決定了內核所能給應用系統提供的最小時間間隔服務。該中斷由C8051F020($12.6125)的TO定時器完成,設置定時時間為20 ms。修改代碼如下:
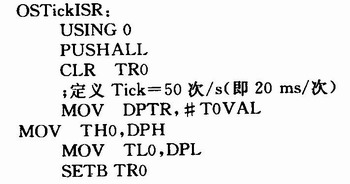
其中:TOVAL是16位定時器T0的時間常數,該系統采用25 MHz的外接晶振,模式1(16位)定時。
2.3 OS_CPU_C.C文件的修改
該文件中定義10個C函數,如下:

其中,最重要的是OSTaskStklnit(),它的作用是初始化堆棧,返回堆棧的最低地址、堆棧的長度,方便匯編語言實現任務的切換。其他9個函數是暫無具體功能,其功能可以根據需要在系統內核擴展時添加。
3 基于μC/OS-Ⅱ的數控機床系統設計
3.1 執行控制器的軟件結構
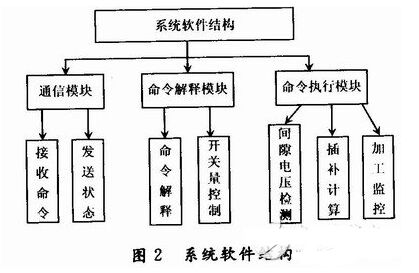
如圖2所示,系統總體分為3個功能塊,即:與IPC的通信、命令解釋和命令執行。其中,通信有發送和接收兩方面內容;命令解釋時,直接執行開關量控制命令;命令執行中,需要進行插補計算、檢測間隙電壓和限位開關狀態及加工監測。
3.2 任務劃分及其優先級的確足
(1)發送任務
嵌入式執行控制器發送給IPC的信息有2種:聯絡信號和運行中的狀態信息。嵌入式執行控制器處于待命狀態時,定期向IPC發送聯絡信號,用于確定 IPC 是否正常工作。若IPC運行正常,則IPC收到聯絡信號后,會回送給嵌入式執行控制器一個應答信號,若發送的多次聯絡信號都未收到應答,則認為IPC出錯。嵌入式執行器處于加工狀態時,將運行中的狀態信息以固定格式定期向IPC發送。IPC收到信息后,將其轉換成圖形、文字等信息顯示出來,提供給操作員,便于實時掌握加工狀態,發送任務的實時性要求低。
(2)接收任務
嵌入式執行控制器接收IPC機發送的聯絡、應答和命令3種信息,若接收到聯絡信號或應答信號,則接收任務直接處理(發送應答信號或刷新聯絡狀態位);若既不是聯絡信號也不是應答信號,則認為是命令信息,接收任務將命令完整接收后,關閉寫接收緩沖區,激活命令解釋任務。接收任務是由通信口接收中斷觸發的,其實時性要求高。
(3)命令解釋任務
命令解釋任務首先對接收緩沖區的命令信息進行校驗和解釋,處理完成后,清空并開放接收緩沖區,允許新命令的接收。這樣做的目的是不在接收緩沖區中積壓多條命令,在當前命令解釋完成之前,不接收新命令,以提高嵌入式執行控制器對命令的響應速度。根據命令執行時間的長短,將命令分為開關量控制命令和插補命令2 種。開關量控制命令的執行時間短,因此在命令解釋后直接執行,以減少任務切換的時間消耗。插補命令是加工命令,運行時間長,采用專門的加工監控任務來執行,命令解釋任務只負責在命令解釋完成后激活加工監控任務。命令解釋任務的實時性要求高。








評論