關于晶振及其典型應用的探討

一、晶振介紹
本文引用地址:http://www.j9360.com/article/201607/294230.htm石英晶振是石英晶體諧振器和石英晶體時鐘振蕩器的統稱,它是一種用于穩定頻率和選擇頻率的電子元件,可分無源晶振和有源晶振兩種類型。
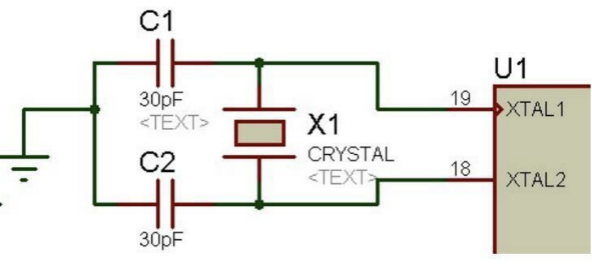
(1) 無源晶振為Crystal(晶體)。
其必須借助外部的有源激勵和振蕩電路才能起振,振蕩頻率主要取決于晶體的切割方式,外部振蕩電路也部分影響著振蕩頻率的精度。振蕩電路中包含兩個Trim電容,由于電容的精度一般比較低,因此即便是完全相同的電路圖,振蕩頻率的頻偏也可能存在一定的差別。
(2) 有源晶振Oscollator(振蕩器)
它是將振蕩電路和晶體集成在一個封裝內,加電即可輸出時鐘信號,頻率精度較高,價格也略高。
常用的晶振的技術指標如下:
(1) 基準頻率:晶振在完全理想條件下的振蕩頻率。
(2) 工作電壓:晶振的工作需要外部提供一定的電源電壓,晶振輸出的時鐘信號上的噪聲與電源再說緊密相關,因此在晶振器件資料上,對電源的質量有一定的要求。
(3) 輸出電平:晶振與晶體相比,最為突出的一點就是只要上電,就直接輸出時鐘信號。時鐘信號的電平也多種多樣,支持的電平主要包括:TTL、CMOS、HCMOS、LVCOMS、LVPECL、LVDS等。在選型中,應根據所需時鐘電平的種類選擇相應的晶振。
(4) 工作溫度范圍:根據環境溫度要求的不同,應選擇對應的工作溫度范圍。
(5) 頻率精度:對應不同的工作溫度范圍,可選擇不同的頻率精度。以±15ppm@-20~70℃為例,其含義是,在-20~70℃溫度范圍內,該晶振輸出頻率相對基準頻率的偏差不會超過15ppm。該參數是晶振的重要參數,包含了由于溫度變化、電源電壓波動、負載變化等因素引起的頻率偏差。
(6) 老化度:在恒定的外接條件下測量晶振頻率,頻率精度與時間之間的關系。
(7) 啟動時間:從上電到晶振輸出頻率的偏差達到規定的頻率精度所需要的時間。
(8) 時鐘抖動(Jitter):在后面內容詳細介紹。
(9) 相位噪聲:在后面內容詳細介紹。
有源晶振的類型包括以下幾類:
(1) 普通封裝晶體振蕩器(SPXO)
它無溫度補償功能,也無電壓控制功能,其頻率特性完全取決于晶體以及外部振蕩電路。標準頻率為1~100MHz,頻率精度最高可達±10ppm。由于SPXO不包含任何頻率補償功能,因此是晶振中精度最差的一個種類,價格低廉,通常作為微處理器的時鐘器件。在PCB布局時,SPXO器件應遠離發熱源。
(2) 壓控式晶體振蕩器(VCXO)
VCXO是通過外部施加控制電壓時振蕩頻率可調的晶體振蕩器。它的特點:輸出頻率可以通過輸入電壓控制,一般控制范圍為±50~±200ppm。工作原理:通過改變外加調整電壓的大小,能改變容性負載CL的值,從而實現頻率的調整。由于VCXO的具有振蕩頻率可調整的特點,所以用頻率—溫度穩定度來定義環境溫度變化對頻偏的影響。由于VCXO不具備溫度補償功能,因此在PCB布局時,VCXO器件應遠離發熱源。VCXO除了電源電源外,還需要控制電壓,以調整輸出頻率,當控制電壓調整為中央電壓時,VCXO輸出標稱的基準頻率。VCXO常用在鎖相環電路中。
(3) 溫度補償晶體振蕩器(TCXO)
TCXO是利用附件的溫度補償電路以減少環境溫度對振蕩頻率的影響,其特點是頻率精度遠遠高于SPXO和VCXO。工作原理:利用熱敏電阻的溫度敏感性,當溫度變化時,熱敏電阻的阻值和容性負載同時發生變化,而容性負載的變化會改變振蕩頻率,從而實現對振蕩頻率的修正。
(4) 恒溫晶體振蕩器(OCXO)
將晶體和振蕩電路置于恒溫箱中,以消除環境溫度變化對頻率的影響。頻率精度為10-10~10-8量級。頻率穩定度在四種類型振蕩器中最高。
不同的特性決定了四種類型晶振的應用場合:如果需要設備即開即用,需選用SPXO、VCXO和TCXO。OCXO晶振需要一定的穩定時間。如果要求時鐘信號較高的穩定度,推薦使用TCXO和OCXO。
二、兩個重要概念:時鐘抖動與相位噪聲。
數字信號的各個有效邊沿相對于其理想位置都存在一定的偏離,對于其中的短期性偏離(頻率在10Hz以上的偏離),使用時鐘抖動和相位噪聲參數來定義;對于其中的長期性偏離(頻率在10Hz以內的偏離),使用漂移來定義。其中漂移容易被CDR(Clock Data Recovery,時鐘數據恢復電路)等模塊濾除。時鐘信號的質量通常用抖動和相位噪聲來描述。時鐘抖動和相位噪聲的區別在于:時鐘抖動是時域的概念;相位噪聲是頻域的概念。時鐘抖動通常分為時間間隔誤差(Time Interval Error,簡稱TIE)、周期抖動和相鄰周期抖動。以下重點討論周期抖動和相位噪聲的關系。
1、時鐘抖動
周期抖動(JPER)是實測周期與理想周期之間的時間差。由于具有隨機分布的特點,可以用峰-峰值或均方根(RMS)描述。首先定義門限VTH的時鐘上升沿位于時域的TPER(n),其中n是一個時域系統,如圖1所示。JPER表示為:
其中T0是理想時鐘周期。由于時鐘頻率固定,隨機抖動JPER的均值應該為零,JPER的RMS可表示為:
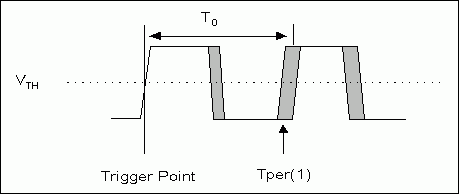
圖1 周期抖動測量
利用示波器的邊沿觸發和余輝功能,可以粗略的測量信號的抖動。使用該方法的測量并不具有實際意義。原因:(1)隨著測量時間的增加,測得的抖動值將不斷增加,即利用這種測量方法,無法得到確定的抖動值;(2)即使能得到確定的抖動值,這樣的值對電路設計也沒有任何指導意義,只能粗略判斷所使用的晶振的抖動情況。






評論