基于STM32的MPPT光伏匯流箱設計

摘要:提出了一種以STM32F103為控制芯片的MPPT匯流箱的設計方法,一片STM32F103控制四路BOOST電路,四路控制脈沖相位互錯90度,以減小輸出紋波;RS485主從式的通訊架構;采用基于功率預測的MPPT算法,電壓外環電流內環的控制方法;基于最小時間片的軟件設計。
本文引用地址:http://www.j9360.com/article/201603/287499.htm引言
近年來,由于光伏技術的發展,對光伏發電系統的發電密度提出了越來越高的要求,電站業主希望單位光伏組件下,能夠取得更高的發電收益。在山地等地形復雜,朝向各異的光伏電站里,組串式逆變器和MPPT匯流箱由于在組串級集成了光伏最大功率點追蹤功能,越來越受到業主的青睞。然而,組串逆變器存在交流線損大和并網諧波大電能質量較差、造價大等缺點;MPPT匯流箱配合集中式逆變器,不但發揮了集中式逆變器電能質量高諧波小,交流線損小等優點,同時還具有組串式逆變器組串級MPPT追蹤的優點,越來越受到人們的追捧。但是,由于MPPT匯流箱較普通的匯流箱增加了成本,在方案設計和器件選型上必須充分考慮成本因素。一般的MPPT控制算法往往采用DSP等MCU來實現,但DSP器件成本相對一般的MCU成本較高。
STM32是意法半導體生產的ARM CORTEX內核的MCU,STM32F1系列屬于中低端的32位ARM Cortex-M3內核微控制器,最高72MHz工作頻率,在存儲器的0等待周期訪問時可達1.25DMips/MHZ(DhrystONe2.1),單周期乘法和硬件除法。由于具有性價比突出的優點,再越來越多的領域得到了廣泛應用。
本文研究了一種基于STM32F103的MPPT匯流箱的實現方法,包括MPPT算法和控制的實現,TI IQmath庫在STM32上的移植,MPPT匯流箱電路結構和實現方法;列舉了實驗數據和實驗效果。
1 MPPT匯流箱的電路結構
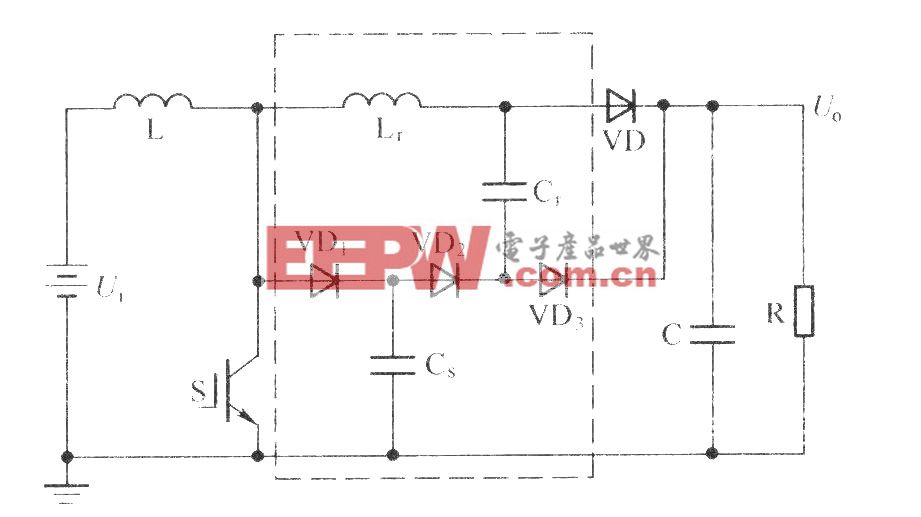
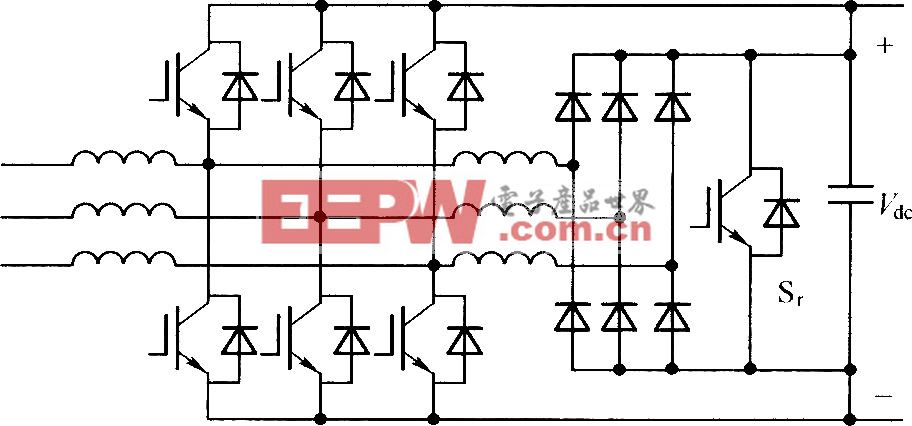
如圖1所示,MPPT匯流箱集成了多路MPPT追蹤器,N匯一的MPPT匯流箱可以集成N路MPPT追蹤器。如圖2所示每兩路MPPT追蹤器共用一個STM32控制,構成了一個MPPT追蹤器單元;每相鄰的兩路BOOST電路并聯二極管輸出,當輸入電壓大于輸出電壓,MPPT停止工作,采用二極管直通發電的形式,從而最大限度降低,BOOST升壓電路損耗;多路MPPT追蹤器采用并聯結構,為了得到更小的紋波,MPPT追蹤器單元內部四路BOOST采用互錯90度相位輸出,其中G1和G2內部兩路BOOST錯180度相位。如圖2 BOOST1和BOOST2錯180度相位,BOOST3和BOOST4錯180度相位,BOOST1、BOOST3、BOOST2、BOOST4互相錯90度相位。這樣的優點是,可以采用更小的輸出電容,系統也更容易穩定。

可以看出,BOOST的電感電流波形為鋸齒波,兩路鋸齒波之間在相位上互相差180度。
2 MPPT追蹤器之間的通訊

2.1 通訊架構
N路 MPPT追蹤器并聯組成MPPT匯流箱,MPPT匯流箱首先要收集各個追蹤器的信息,匯總之后要和遠端進行數據交換。匯流箱之間采用RS485總線的通訊架構,N路MPPT追蹤器之間也采用RS485總線方式通訊,通過撥碼開關選擇485地址,其中1號追蹤器為主站,其他N-1路為從站。RS485為差分方式的線路結構,能夠最大限度的抗系統的共模干擾。

主站負責收集從站信息,同時主站對外也采用RS485方式傳輸匯流箱信息。
2.2 通訊協議
協議采用MODBUS RTU協議,Modbus是由Modicon(現為施耐德電氣公司的一個品牌)在1979年發明的,是全球第一個真正用于工業現場的總線協議。特點是穩定可靠,通用性強。
主站格式
從站格式
寄存器內容(例)
.......

3 MPPT控制算法
MPPT控制算法采用3點式功率預測的方法,如圖4所示PK2為當前周期的功率值,PK1和PK0分別是上周期和上上周期陣列功率。UK和UK0分別是當前周期和前上上周期陣列電壓。
本模塊等效的采樣周期等于本模塊所設采樣周期TA的2倍,這是因采用基于功率預測的最大值追蹤方法所需要的。該方法按上述P1采集3點功率值,該3點功率值相當于在2TA周期兩端增加中間1點采樣;令電壓給定增量在每個2TA周期的第1個TA周期為0;分別計算功率增量和電壓增量,令ΔP’K2=(PK2-PK1)-(PK1-PK0),ΔU=UK-UK0;根據ΔP’K2和ΔU極性、以及ΔP’K2或ΔU是否為0進行邏輯判斷,決定電壓給定增量極性。
基本判斷邏輯:當ΔP’K2/ΔU<0時,減小電壓給定;當ΔP’K2/ΔU>0時,增加電壓給定。步長與dP/dU絕對值成正比,實現變步長追蹤,便于收斂。
采用該方法,可避免MPPT誤判。例如,當光伏陣列光照不變時,陣列電壓-功率特性曲線不變,因電壓給定增量在每個2TA周期的第1個TA周期為0,則PK1=PK0,預測功率P’K2=0,采用基本判斷邏輯不會誤判。

4 PV MPPT控制實現
MPPT控制的算法實現基于BOOST硬件電路,控制算法上采用電流內環,電壓外環的控制結構,MPPT算法模塊算出電壓環的電壓給定,電壓調節器計算出電流調節器的電流給定。其中電流調節器采用最小控制周期(64uS),電壓調節器采用8倍最小控制周期(512uS),
MPPT算法模塊采用2000倍的最小控制周期(128mS)。
5 基于STM32的實現
(1) 應用IQmath庫
由于STM32F103系列MCU 為定點MCU,計算浮點算法要消耗大量的時間,因此直接計算浮點乘法是不可取的。本文將TI IQmath算法庫移植到了STM32F103上。
德州儀器(TI)IQmath 是一個高度優化和高精度的數學函數庫集,通常用于計算密集的實時應用,可以獲得最佳的執行速度和高精確度。此IQmath庫是TI為其C2000系列定點DSP發布的實時算法庫,在STM32上應用還比較少。

(2) 如何得到得到最小的CPU帶寬
由于一個STM32F103負責控制兩路mppt,那就需要兩個MPPT算法塊,兩個電壓調節器和兩個電流調節器。而最小控制周期是最占用CPU帶寬的,最小控制周期會執行電壓電流AD采樣值計算,標幺化處理,以及兩個電流調節器算法,以及PWM脈沖的生成。
為了在最小的控制周期里執行完成這些內容,可以進行如下處理。
1)AD采樣采用DMA方式,STM32F103兩個ADC同時采樣
2)IAR編譯器設置優化為:最大速度優化
(3) 如何構建時間片方式的架構
在實時控制系統中,要求CPU嚴格以時間片方式執行控制算法。本文采用了ucos ii操作系統方式。STM32的PWM是由定時器生成,因此,本文采用了以PWM定時器作為ucos ii的時鐘節拍,分配不同的控制周期為不同的任務,最小控制周期有最高的優先級。
6 MPPT追蹤器效率
經實驗測得MPPT追蹤器效率為99.306%

7 MPPT追蹤精度
采用Topcontrol光伏模擬源模擬PV組件,MPPT追蹤曲線如圖7所示,可見MPPT追蹤精度實測達到了99.9%
8 結論
經實測本MPPT匯流箱,達到了預想的效果,實現了較高的效率和較高的追蹤精度。應用在光伏組串側,能夠實現組串級的MPPT追蹤,與集中式逆變器相配合,能夠實現更加多路的MPPT追蹤效果,具有很廣闊的應用前景。
參考文獻:
[1] 劉文晉,基于雙重Boost電路的大功率光伏MPPT控制器 現代建筑電氣
[2] 趙爭鳴,太陽光伏發電最大功率點跟蹤技術
本文來源于中國科技期刊《電子產品世界》2016年第2期第45頁,歡迎您寫論文時引用,并注明出處。







評論