智能電網:微網并網控制策略的研究

微網(MG)作為智能電網重要組成部分,目前在控制方面還存在一些問題,特別是微網的解列和并網控制。針對并網過程對微網和主電網電能質量的影響,通過研究電網中的頻率和功率特性關系,對微網并網過程中的功率流動進行了詳細的分析。最后使用電力系統仿真軟件PSCAD/EMTDC對并網過程進行了仿真,通過比較最佳并網時刻前后的不同并網過程,分析了其頻率和功率變化的不同。研究結果表明,微網和主電網電壓相對相位的不同對并網過程的電能質量有很大的影響。
本文引用地址:http://www.j9360.com/article/201195.htm0 引 言
隨著我國對智能電網研究和規劃的正式啟動, 作為智能電網基礎部分的分布式電源(Distributed Generation, DG)越來越受到人們的關注。DG 主要包括微汽輪機、風能、太陽能、燃料電池、生物質能等。其一般和負載一起組成微網, 作為一個可控單元接入主電網。在并網運行時, 微網通過公共連接點和主電網連接, 當主電網發生故障或者電能質量問題時, 微網迅速與主電網斷開, 獨立向內部負載供電 , 當故障解除、主電網恢復正常后, 微網可以再次和主電網并網運行。為了保證在并網過程中微網和主電網的電壓和頻率等電能質量指標符合國家標準, 并網過程一定要采取合理有效的控制策略, 保證并網過程的順利安全進行。
本研究中只考慮并網后電網向微網注入功率, 而微網向電網注入功率的控制在以后的研究中進一步深入探討。通過PSCAD /EMTDC仿真, 重點研究并網過程的電壓和頻率波動, 提出安全有效的并網控制方法。
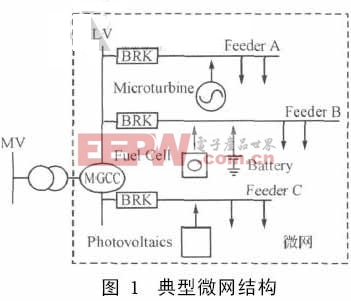
1 典型微網結構
典型微網結構如圖1所示, 主要由分布式電源、儲能系統、負載和保護裝置組成一個低壓電網( low voltage, LV), 通過變壓器和主電網的中壓電網(medium voltage, MV)連接 , 當主電網中發生重大電能質量問題時, 微網控制中心(MicroGrid Control Center,MGCC)控制微網進入孤島模式運行, 保護微網內部敏感和重要設備。微網的并網是一個復雜的控制過程,在閉合之前需要對一些電能質量指標進行檢查, 只有這些指標滿足同步并網要求, 才能合上開關接入主電網。
2 并網后的功率流動
在電力系統中,當功率出現不平衡或者頻率發生變化時,頻率和功率的調整是由負荷和電源兩者的調節效應來完成。系統中的頻率和有功功率間的關系為:
$f = - Ks$P = - Ks(P0-P1) (1)
式中Ks系統的頻率調節特性;$P系統有功功率的變化;P0、P1不同頻率下對應的功率;$f系統頻率的變化。
在孤島模式下,DG提供了微網內部負載所需的所有功率。并網后DG產生功率的多少由微網控制中心的指令決定,微網所需功率的缺額部分再由電網注入。
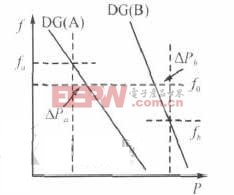
圖2 孤島系統的頻率-功率特性圖
兩個孤島系統的頻率-功率特性圖如圖2所示。在連接之前,DG(A)、DG(B)分別以不同頻率獨立向各自負載供電,DG(A)的頻率為 fa,DG(B)的頻率為fb,連接后成為含有兩個DG的孤島。在分開運行時A比B的頻率要高,當它們并網連接后只能在同一個頻率f0下運行。從圖2可以看出,此時A由于頻率下降增加了$Pa的功率輸出,B由于頻率上升減少了$Pb的功率輸出,而整個網絡的負載沒有變化,所以$Pa等于$Pb,并網后功率從A流向了B。同樣,如果并網前DG(A)的頻率低于DG(B),連接以后功率從B流向了A。這說明并網后功率會從并網前頻率高的流向頻率低的,所以要使并網以后功率從電網流向微網,必須保證并網前電網頻率要稍高于微網頻率。
上面這種情況在實際應用中也是很有可能遇到的,當發生重大事故后,所有DG都將和微網分離,在微網重新啟動時,DG將依次接入微網。
一般來說,并網前兩個獨立運行的系統,其運行頻率很難調整到完全相同。并網前電網電壓和微網電壓分別為U#g和U#m,電壓幅值Ug=Um,頻率fgXfm。假設并網后功率從電網注入微網,根據并網后功率流動的分析,fm要稍低于fg,可得開關兩側的電壓差Us為:
Us=Ugsin(Xgt+Ug)-Umsin(Xmt+Um) (2)
其中,Xg=2Pfg,Xm=2Pfm。
式(2)可變換為:

式中D)滑差角頻率,D=Xg-Xm;B)初相位差,B=Ug-Um。
則式(3)可表示為:

由于Uk是一個大小波動的值,Us是以2Ug為最大值的脈動電壓。
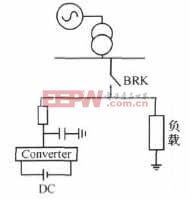
圖3 微網仿真模型圖
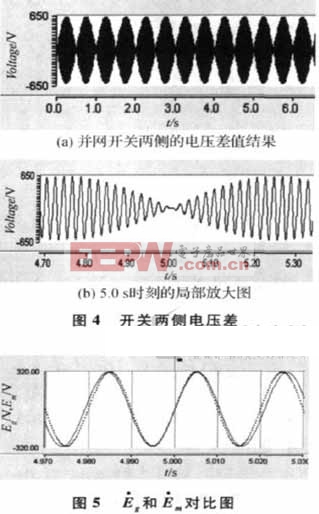
微網仿真模型圖如圖3所示,微網含有一個DG和負載,以直流電源通過逆變器產生交流電來模擬DG,微網通過并網開關和主電網連接。假設并網前電網電壓為 E#g,微網電壓為E#m,根據上面功率流動的分析,要使并網后功率從電網流向微網,并網前電網頻率要稍高于微網頻率,即E#g的頻率稍高于E#m的頻率。同時根據上面對電壓差的分析得出式(5),可知并網開關兩側的電壓差是脈動電壓,仿真結果如圖4(a)所示。在5.0s時刻的局部放大圖如圖4(b) 所示,從圖中可以看出,5.0s是最合適的閉合開關時刻(這樣的時刻是周期性出現的),開關兩側的電壓差最小,閉合過程產生的瞬間電流也很小,安全性能比較高。
電壓E#g和E#m的對比圖如圖5所示(點劃線是電網電壓E#g,實線是微網電壓E#m)。綜合圖4和圖5可以發現在5.0s是并網的最佳時刻,但是在實際應用中恰好在5.0s這個時刻閉合開關的可能性很小,往往都是這點的前后合上開關。仔細觀察圖5可以發現在5.0s前后是兩種不同的情況,5.0s之前是E#m超前于E#g,即E#m的相位超前E#g,5.0s之后則是相反的情況,E#g超前于E#m。下面重點分析這一不同點對并網過程的影響。
微網的總負載是2.0pu,在孤島模式下由DG提供了全部的功率,而并網后要求DG的輸出功率是1.0pu。首先在5.0s之前閉合開關,在這個時間段E#m超前于E#g,就是說頻率低的電壓相位超前于頻率高的電壓,同時保證開關兩側的電壓差盡量小。在并網過程中DG的輸出功率和頻率的變化如圖6所示。
從圖6(a)可以看到,在并網過程中有一段向上的功率輸出波動,然后又迅速回到正常水平。因為在并網前后整個系統的總負載沒有變化,對微網來說,那些額外產生的功率流向了并網后的主電網。從圖6(b)中可見,并網過程中有一段頻率突然下降,短時間內產生了激烈的波動。
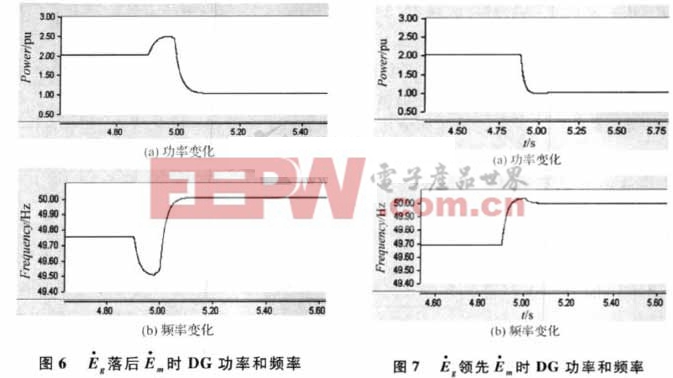
5.0s之后閉合開關的情況如圖7所示,電壓差比較小的時候并網,頻率高的E#g超前于頻率低的E#m,從圖7(a)可以明顯地發現功率從2.0pu變化到1.0pu,沒有較大的波動,過渡比較平穩。在圖7(b)中,頻率的過渡同樣也是比較平滑。因此如圖7所示的情況才是最佳的并網過程,頻率和功率波動都比較小,而且由于是在電壓差比較小的時刻閉合并網開關,開關中產生的瞬時電流也比較小,整個過程中電能質量得到了有效的保證。
4 結束語
本研究通過對含有一個DG的微網并網過程仿真,研究了并網過程中頻率和電壓波動變化,著重分析了在并網前開關兩側電壓相對相位超前和落后的兩種不同情況,提出了微網并網的最佳控制策略:
(1)并網時開關兩側的電壓差必須很小,理想狀態為零;
(2)電網頻率必須稍高于微網頻率;
(3)并網時刻電網電壓必須超前于微網電壓。
并網后微網向主電網注入功率的情況在以后進一步進行研究。
更多好文:21ic智能電網









評論