汽車電液助力轉向系統ECU的設計與開發

系統介紹
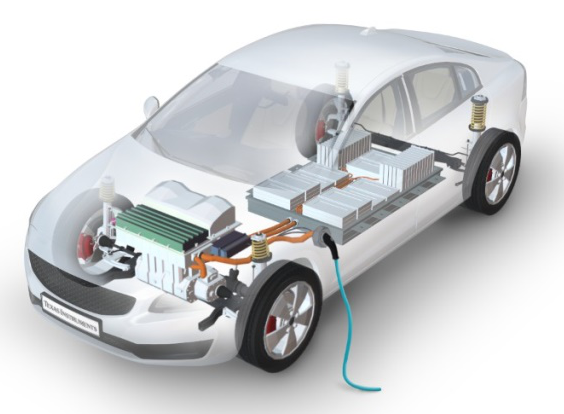
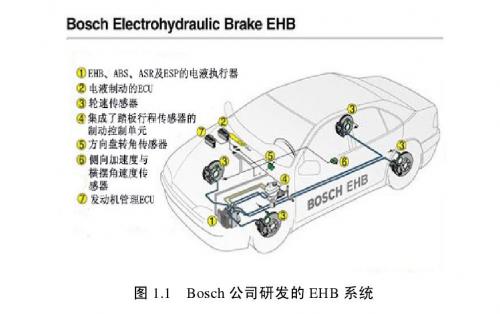
電動液壓助力轉向系統(EHPS)主要由以下幾部分組成,它們是助力轉向控制單元(ECU)、助力轉向傳感器、帶電動泵的齒輪泵、儲油罐、轉向傳動裝置、CAN 總線系統。我們的主要工作是助力轉向控制單元(ECU)的軟硬件研究與開發。助力轉向控制單元根據助力轉向傳感器傳來的信號為主,兼或考慮CAN 總線上的車輛速度來進行電動泵的轉速控制,進而控制齒輪泵的泵油量來達到控制助力轉向傳動裝置的目的。這樣我們就可以根據車輛方向盤的轉向角速度和車輛當前的行駛速度來確定我們當前所需要的轉向助力的大小。
1. ECU 設計概要
1.1 ECU 的CPU 的選擇
控制器(ECU)的設計關鍵是選擇一種適用于特定控制目標的單片機,對車輛電動液壓助力轉向系統來說,它對單片機要求有如下幾個特點:
① 抗環境干擾,滿足汽車級芯片溫度范圍的要求,即-40~+125℃。
② 有較多的I/O 口,以實現多種控制功能;快速的計算速度,以滿足實時控制要求。
③ 采用標準的通訊接口,以便于診斷功能的實現,同時具有與車輛上其它CPU 進行通訊的能力。
④ 有較好的性能價格比,便于批量裝車,使之成為一種普及型產品。
基于上述特點采用16 位單片機對電動液壓助力轉向系統是一種適中的選擇。并且國外電動液壓助力轉向系統產品目前絕大多數都選用這一檔次的單片機。Infineon XC164CM 正是這一適中產品,它是Infineon 公司為車輛控制系統設計的16 位單片機。
1.2 ECU 模塊設計
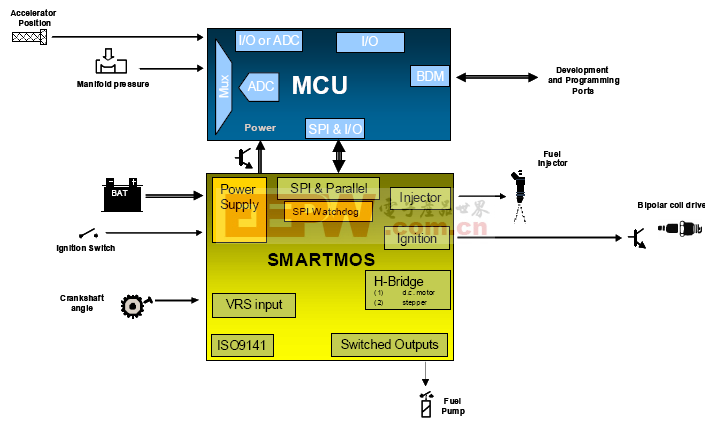
見圖1,所設計的基于Infineon XC164CM 單片機,它包括輸入、輸出、故障診斷、車輛信息數據傳輸四個模塊。
①輸入模塊
輸入采用XC164CM 的輸入捕捉功能CAPCOM 單元,每個輸入通道對應一個獨立的CAPCOM 通道。CAPCOM 通道可以在每個事件接收后發出中斷,它有一個捕捉寄存器CCx,即可以保持1 個事件。由于中斷地址是獨立的,這樣進入中斷服務程序就不用再識別是哪個中斷源,提高了中斷服務處理的效率。在本系統中亦采用CC16 和CC17 作為2 個霍爾器件脈沖的輸入信號撲捉通道,采用CC23做為方向盤轉角脈沖的輸入信號撲捉通道。采用CAPCOM 通道使采集信號的質量大大提高,CPU 占用時間少,CAPCOM 的捕捉事件的分辯率在20MHz 主頻下為400 ns。
②輸出模塊
XC164CM 有47 個I/O 端口,在本系統中采用P1 口作為控制輸出口。每個I/O 口都用獨立的控制器控制輸入/輸出。
③診斷模塊
EHPS 是一種可靠性要求很高的系統,要求內部程序對系統要隨時進行監控,一旦發生故障,能及時記錄下來,并把其存貯起來。本系統采用I2C 總線的E2 PROM 作為故障代碼存貯器,用XC164CM的同步串行功能實現I2C 總線與E2PROM 通訊,XC164CM 作為主機,E2PROM 作為從機。通過XC164CM的CAN1 口實現外部診斷通訊,與PC 機端是通過USB 數據采集卡連接通訊。
④車輛信息數據傳輸
單片機XC164CM 帶有兩個CAN 總線控制器,CAN1 和CAN2。內部有2K 字節的CAN 寄存器空間來實現CAN 通訊,它有32 個信息體,每個信息體有8 個字節的數據可以傳送。EHPS 系統所需的車速和發動機轉速就是通過2. ECU 軟件設計
該程序結構采用C 語言中流行的多模塊結構,這種結構比起以往的單模塊結構來說有程序結構清晰,便于程序移植和程序維護等特點。
2.1 EHPS ECU 的主程序
EHPS 主循環是一個定時循環調用程序,程序框圖見圖2。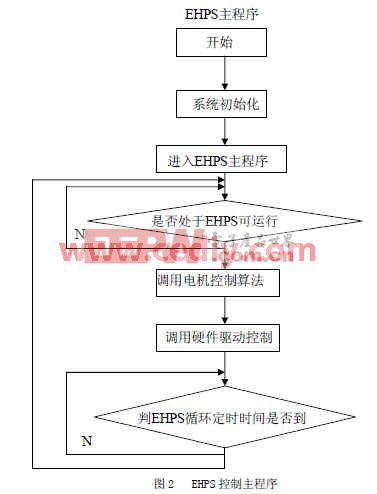







評論