組合導航定位技術在機車安全監控系統中的應用研究

針對目前火車機車監控系統中GPS定位精度低、抗遮蔽性差的問題,提出了一種基于GPS、ADXRS150微硅陀螺儀和機車速度傳感器的組合導航定位設計方案,建立了組合導航信息融合算法模型,給出了實驗結果數據。
本文引用地址:http://www.j9360.com/article/197816.htm 在實際應用中準確判斷了機車進站軌道,提高了定位精度,為機車的遠程監控提供了可靠的位置數據。
從1997年至今我國鐵路實施了五次大提速,提速網絡基本覆蓋了全國主要地區,特快列車最高時速從120公里提高到了160~200公里。隨著機車運行速度的提高,對安全可靠性的要求也相應提高,這就需要對系統進行同步改造,加強監控措施,確保運行安全。行車安全監控是鐵路信息化總體規劃應用體系中的重要組成部分,是提高鐵路運輸安全保障能力的重要技術手段。組合導航定位技術在機車安全監控系統中的應用,可以解決單一GPS定位精度低、抗遮蔽性差的問題[1],實現機車運行軌跡的準確定位和進站軌道的準確判斷,為行車安全監控系統提供可靠的運行數據。
1 機車組合導航定位終端設計原理
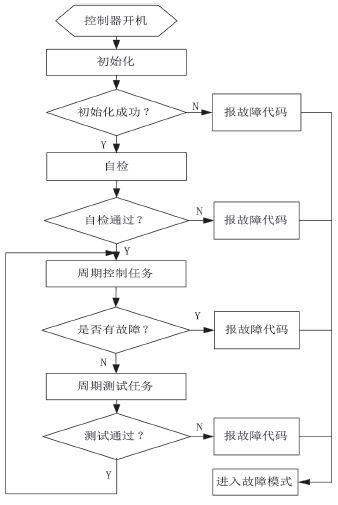
機車組合導航定位終端要求對GPS信息、陀螺儀信息、機車速度傳感信息進行融合處理,并將融合處理后的信息通過GPRS無線網絡傳輸到監控中心。同時,在本地采用大容量Flash存儲器,保存軌道線路的一些特征參數,該特征參數可以通過無線方式自動更新,確保軌道特征參數的實時性。終端通過對采集到的各種狀態信息進行融合處理,并和軌道特征參數進行比較,發出各種提示信號。終端原理圖如圖1所示。

系統主控CPU為LPC2138,該CPU為ARM7內核[2],負責對各種信息的融合處理;GPS模塊采用GARMIN15 引擎板,在定位情況下,用于獲取機車所在位置的經度、緯度、海拔高度信息;ADXRS150微硅陀螺儀,用于獲取機車的角速度信息。AD574是12位 A/D轉換芯片,用于對ADXRS150微硅陀螺儀輸出的模擬角速度信號進行采樣和量化;三星K9F5608 Flash用于存儲軌道的一些特征參數;電源管理模塊輸入為110V直流電源,輸出為12V、5V、3.3V電壓,為各模塊的正常工作提供穩定的電源。
2 組合定位信息的分析與處理
2.1 GPS定位信息
GARMIN15 GPS引擎板定位精度15米(無干擾),輸出數據格式為NMEA0183。該格式包含多種語句,其中GPRMC是最常用的語句,該語句說明了所在位置的經度、緯度、時間、海拔高度以及目前的速度等信息。其具體語句格式為:$GPRMC,1>,2>,3>,4>,5>,6>,7>,8>,9>,10>,11>,12>? 鄢hh。GPS引擎板每隔1秒鐘通過串口輸出一次數據,其串口波特率為9600bps。GPS在定位的情況下能夠提供非常準確的時間信息。








評論