基于ARM 的紅外光汽車速度管理系統研究

引 言
本文引用地址:http://www.j9360.com/article/197770.htm車輛在公路上應以與路況相符的速度行駛,太快了易出事故, 太慢了將成為后續車輛的絆腳石。但是,常有個別司機不按規定的速度行駛而違章,導致事故頻生。交管部門為了取證糾違, 目前多采用雷達測速系統(利用多普勒效應)對違章車輛進行測速取證,予以處罰。
可近期市場上出現了一種叫做“電子狗”的反雷達測速裝置,此裝置在接近雷達測速區時,能提前捕捉到雷達測速的信息而報警,使違章車輛逃脫處罰,事故隱患猶存。因此,研究一套既能準確測定汽車速度, 又不會被“電子狗”所發現的可靠測速、管理系統就尤為必要。
本文研究的以紅外光傳感器、ARM 為核心部件的新型測速系統測速時不會被“電子狗”所發現,不僅能識別汽車速度V 的大小,還能測出其速度超過上限速度(Vmax)的量值(+△V)或低于下限速度(Vmin)的量值(―△V)等信息,據該信息酌情驅動取證系統(打印、照相)工作,能有效提高交通管制的力度。
1 系統工作原理
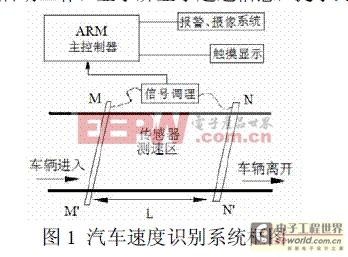
系統由調制式紅外光傳感器[1]、飛利浦公司的LPC2294 ARM 嵌入式處理器,帶觸摸屏的彩色液晶顯示器以及報警攝像等系統構成,如圖1 所示。圖1 中M、N 兩點是路旁一側護欄上的兩點,分別安裝著可發射38KHz 的紅外發光管,一直向外發射調制式紅外光。調制式紅外光被另一側護欄上相應的兩點M’、N’處安放的光電接收器接收,共同組成一個光控測速區。當有車輛通過光控測速區時,M 點發出的光線首先被阻斷,第一個光電探測器M-M’將光信號轉換為電信號送入信號調理電路,經過放大、整形,送至ARM 處理器。ARM接到此觸發信號,打開內部計數器開始計數,時間t 的值相應不斷增加。當汽車達到N 點時,第二個光電探測器N-N’將光信號轉換為電信號經信號調理電路送至ARM 處理器使計數器停止計數,t 的值就確定了。由M、N 兩點間的距離L 除以t 便得到速度V。如果計算得到的V 值在設定的安全速度范圍之內,顯示屏則顯示當前安全速度值,攝像、報警電路就不工作;如果V 值超出設定范圍之外,則計算速度偏移量△V =Vmax―V,同時顯示該車輛超速行駛,并讓攝像、報警電路啟動工作。同理,若車輛以VVmin 的低速狀態通過光控測速區時,照相及報警系統亦啟動工作,顯示屏顯示超速信息,提示此時車輛處于超低速行駛狀態。
2 系統硬件設計
2.1 光電發射接收系統
光電發射接收系統原理如圖2 所示。振蕩器產生頻率為38KHz 的信號, 驅動紅外發光管發光。光電接收器則接收紅外發光管射出的光脈沖,接收到的光脈沖信號經調節電位器連接到檢測器的輸入端[2]。將接收到的調制式光脈沖信號送入放大器進行放大,經閾值檢測后變成與同步振蕩器同步輸出的邏輯電平脈沖,再通過脈沖同步解調,得到與車輛運動狀態相關的光電信號,并經緩沖輸出。

2.2 信號接收與定時器工作
如圖3 所示,在沒有車輛經過光控測速區時,M’、N’兩
點一直能接收到38KHz 的調制紅外光,均輸出高電平,暫穩態
電路均處在穩態。門G 的輸出為邏輯1,UL 始終為高電平。當
有車輛通過光控測速區時,M 點發出的光線首先被阻斷,UM 由
高電平先變為低電平,暫穩態電路1 被觸發而進入暫穩態,如
圖4 中的t1 時刻之后所示。此時,UM’為低電平,G 門觸發,
輸出UL 為低電平。ARM 系統的CAP1.0 捕獲到UL 由高電平變低
電平,發生下降沿捕獲,自動裝載T1TC 的值傳輸到捕獲寄存器
T1CR,并產生中斷,進入中斷服務子程序,讀取T1CR 的值而保
存。









評論