基于CAN總線的客車輕便換檔系統設計與實現

1 引 言
本文引用地址:http://www.j9360.com/article/197740.htm隨著社會經濟的快速發展,城市交通曰益繁忙,交通安全問題越來越受到人們的重視。在車輛行駛過程中,駕駛員必須根據道路、交通條件的變化,及時對車輛行駛方向和行駛速度進行調節,使汽車獲得良好的行駛性能和燃油經濟性能。頻繁換檔使駕駛員容易疲勞,注意力分散,致使交通事故增加。本文介紹了一種基于CAN總線的客車輕便換檔系統的設計,利用機電一體化技術實現了客車換檔的轎車化。系統主要是結合客車的換擋系統進行的開發設計,包括前后兩個節點,前置節點為手柄控制發令節點,后置節點為執行控制節點,系統總體框架圖如圖1所示。

2 系統應用設計
2.1 系統硬件結構及控制原理
為使系統達到反應靈敏、可靠性高的設計要求,前后節點的控制單元均采用Philips公司生產的P87C591單片機,他成功包括了 Philips半導體 SJAl000 CAN控制器的PelICAN功能,符合系統設計要求。主控系統CAN通信部分電路圖如圖2所示[1]:

系統中擋位、車速和發動機轉速信號的采集由霍爾元件A3144EU來完成,信號經過放大后,通過光電耦合器TLP521隔離,被送到CPU中。 CPU經過邏輯運算后,將輸出信號經過光電耦合器隔離后,送至大功率的場效應管,由場效應管來驅動電磁閥動作,以控制氣缸動作來完成相應檔位的變換。
系統的主要控制過程為:前置節點根據手柄位置的不同以及離合開關的開合實時采集信號并經過邏輯判斷處理成檔位命令,通過CAN總線傳輸到后置節點,后置節點接到檔位命令后,結合車速、發動機轉速及當前擋位對換檔時機進行判斷,然后向執行器發出動作指令。執行器按指令要求使相應的電磁閥開始動作,從而控制對應氣缸動作,來實現擋位的變換。在擋位轉換完成后,還要對反饋信號處理,確定換擋動作完成后,再做出下一步的操作。車型有5個上擋位和一個倒擋位,采用電控氣操作方式,其具體擋位與電磁閥位置如圖3所示。
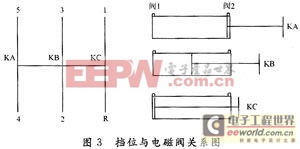
如圖3所示,當閥1通氣、閥2斷氣時,活塞被推到氣缸右端,通過活塞桿把撥叉推到預定位置,將此位置定義為KA層;當閥1斷氣、閥2通氣時,定義為KC 層;當兩個閥都斷氣,由于變速箱內回位彈簧的作用,將會自動定位到中間層,定義為KB層。層位選定后,再通過相應位置上兩個上檔氣閥的作用以實現不同方向的上下檔動作,從而完成預定的選檔和換檔動作。









評論