基于嵌入式Linux的倒車影音系統設計

摘要:采用S3C2440微處理器為控制芯片,基于嵌入式Linux操作系統設計了一種安全可視化倒車系統。通過嵌入式Linux操作系統內核驅動USB攝像頭實時地監控車后狀況,通過超聲波測距結果與閾值的比較來啟動語音報警模塊以提醒駕駛員注意。經實驗驗證,該系統運行穩定,采集的視頻圖像清楚且實時性高,能夠滿足可視化倒車的要求。
關鍵詞:S3C2440;視頻圖像采集;超聲波測距;語音報警
引言
電子信息與數字圖像處理技術目前已被廣泛地應用在各個領域,車載系統的信息化已成為現代汽車業的重要標志。現在的倒車雷達系統可以為駕駛者提供許多幫助,多數采用超聲波測距技術,可以直接顯示出車尾與障礙物之間的距離。但由于超聲波的散射特性,如果地面有尖銳的突起或存在橫在半空的棱角狀物體,系統就不能有效地“察覺”。假如能為現有的倒車系統增加一個可視功能,那么駕駛員在倒車時不必回頭就可清楚車后的情況。本文設計了一種可視化安全倒車系統,該系統采用嵌入式Linux操作系統內核驅動USB攝像頭實現車后狀況實時監控,通過判斷超聲波測距是否達到閾值來啟動語音報警功能。
1 系統方案設計
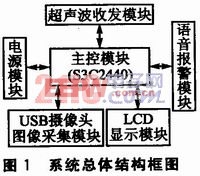
如圖1所示,系統由主控模塊、超聲波收發模塊、USB攝像頭圖像采集模塊、語音報警模塊與LCD顯示模塊等。主控模塊采用三星公司基于ARM9內核的S3C2440微處理器,主頻最高可達533 MHz,處理速度快。采用軟件編程技術實現對其外圍電路的控制,并提供外圍電路所需的各種信號,簡化了外圍電路的設計難度。
2 系統硬件設計
2.1 主控模塊
以S3C2440為核心的主控模塊硬件平臺的組成如圖2所示。

2.2 超聲波發射電路
超聲波發射電路原理圖如圖3所示。發射電路主要由反相器74LS04和超聲波發射換能器T1構成,使用CPU內部的PWM定時計數器輸出的40 kHz方波信號。
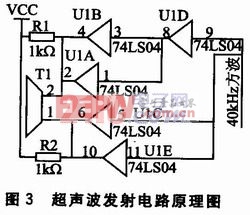
一路經一級反相器(U1C與U1E并聯組成一級)后送到超聲波換能器的一個電極(T1的1腳);另一路經兩級反相器(U1D為第一級,U1B和U1A組成第二級)后送到超聲波換能器的另一個電極( T1的2腳 )。用這種推換形式將方波信號加到超聲波換能器的兩端,可以提高超聲波的發射強度。輸出端采兩個反相器并聯,以提高驅動能力。上位電阻R1、R2一方面可以提高反相器74LS04輸出高電平的驅動能力,另一方面可以增強超聲波換能器的阻尼效果。







評論