基于聲光探測的汽車定位系統

2 紅外線電子移位逐行掃描電路設計和調試
2.1 電路設計
圖2為紅外線電子移位逐行掃描電路。圖中只畫出一對紅外發射和接收模塊的電路,并略去脈沖發生器電路。脈沖發生器產生38 kHz的振蕩信號,經過低頻脈沖調制后,送入發射模塊。紅外發射模塊的電子開關在控制信號為高電平時導通,把脈沖發生器送來的信號發射出去;紅外接收模塊的電子開關也在控制信號為高電平時導通,把紅外接收頭的接收狀態輸出,送至單片機1。電子移位電路由74LSl64串聯組成,有N個輸出端子,每一個輸出端子控制一個紅外模塊。開關信號是一個高電平脈沖,每個移位時鐘周期向前移動一位。由于收發兩側移位時鐘同步,所以,收發兩側對應位置上的紅外模塊會一對一對地按順序輪流接通工作,由此達到電子移位逐行掃描的目的。
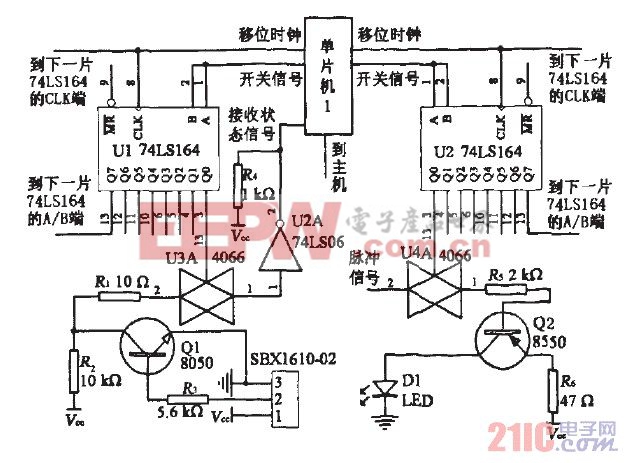
圖2
2.2 掃描速度和精度處理
掃描速度主要取決于移位時鐘的周期出,完成一次掃描的時間:

該電路中在△f≥2 ms時,具有良好的接收可靠性。單片機l通過程序控制,可使△t一2~10 ms,以滿足不同掃描速度的需要。
紅外陣列中,相鄰模塊間距△Z就是縱向的最高定位精度。根據工作區域的縱向最大長度L的要求確定紅外陣列中模塊數量N,要求N×A/=L。



評論