基于聲光探測的汽車定位系統

4 控制軟件設計
控制軟件包括主機軟件和單片機軟件,主要軟件流程如圖4所示。單片機1產生紅外線電子移位逐行掃描電路所需的開關信號和移位時鐘,并在每個移位時鐘周期采集一次接收狀態數據,完成一遍掃描后把數據上傳給主機;還可根據主機指令,通過程序控制改變掃描速度和掃描強度。單片機2分別控制檢測4個超聲波裝置,所計時間經簡單處理后上傳給主機。由于存在盲區,要避開此區間過來的虛假停止脈沖的干擾,采用延時開中斷,即在起始脈沖啟動計時器計時后,等待盲區過去再開中斷,使單片機中斷口接收到實際有效停止脈沖停止計時器計時。主機程序以主動查詢方式輪流從兩個單片機讀取縱向檢測數據和橫向檢測數據,然后依照一定算法,對檢測數據進行處理、分析,先判斷是否有車,有車時判斷車型、計算停車位置參數和車箱幾何參數。
主機軟件采用Delphi編寫,能進行測量參數顯示和工作參數設置。
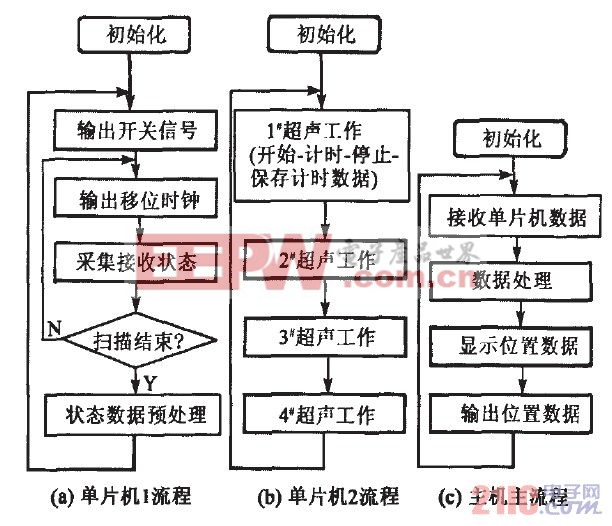
圖4 主要軟件流程
5 測試與結果
測試在室外工業現場進行。工作區為5 m×21 ITI,紅外模塊的間距為5 cm,紅外收發陣列的模塊數均為425。連續對100輛汽車進行定位,包括多種車型,都定位成功。在白天和夜間各抽取5輛汽車的定位數據與實物數據進行現場比對,結果如表1所示。車箱長度和前距測量誤差不超過5 cm,車箱寬度和邊距測量誤差不超過6 cln,單次定位時間最快可達1 s內。

6 結語
結果表明,采用聲光探測技術可實現平面內物體的非接觸定位。基于聲光探測的汽車定位系統,不論是定位速度、定位精度還是定位可靠性,都較當前的其他定位方式有明顯的提高。目前該系統已被用于汽車物料自動取樣控制系統中,在多個鋼鐵電力企業得到應用,運行效果良好。
汽車定位系統用于檢測汽車停車位置參數和車箱幾何參數,為機械手在車箱范圍內作業提供平面坐標數據,是車載貨物自動作業控制系統的組成部分。目前的汽車定位系統多用齒輪傳動的機械移位紅外線掃描方式或基于視頻圖像的人工畫界方式,前者定位速度慢,后者定位精度低,可靠性差,都難以滿足實際定位對速度、精度和可靠性的要求。文中采用紅外線電子移位逐行高速掃描技術和超聲波測距技術實現汽車定位,具有可調定位速度和適應惡劣天氣的能力,還采用多種措施,提高系統的抗干擾能力和可維護性能,實現了快速、高精度、高可靠定位的目標。利用Delphi開發主控軟件,實現數據處理,完成定位結果的顯示、輸出,工作參數設置和狀態檢測,具有良好的開放性,方便與各種控制系統接口。
1 工作原理和系統組成
1.1 工作原理
以透射式紅外光電傳感器和超聲波測距裝置相結合可實現對平面區域內物體的定位。透射式紅外光電傳感器由紅外發射模塊和紅外接收模塊組成,當收發模塊之間有物體遮擋光路時,將改變接收模塊的接收狀態,據此可非接觸探測物體是否存在。
如果把多個發射模塊和多個接收模塊按固定間隔平行排列成兩排,讓收發兩側對應位置上的紅外模塊一對一對地按順序輪流接通工作,對其間區域進行逐行掃描探測,則依據掃描結果不但可判斷該區域是否有物體存在,還可計算出物體的長度及其在該區域中的縱向相對位置。
超聲波測距通常采用渡越時間法,收發頭與被測物體之間的距離:

式中,v為超聲波在介質中的傳播速度;t為超聲波的往返時間間隔。分別在物體兩側標定位置安裝超聲波測距裝置,測出與物體的距離,就可計算出物體的寬度及其在該區域中的橫向相對位置。
1.2 系統組成
圖1為基于聲光探測的汽車定位系統的組成。
圖中單片機1、紅外發射陣列、紅外接收陣列和電子移位電路構成紅外線電子移位逐行掃描電路,用于車箱長度和縱向停車位置的測量。單片機2和4個超聲波測距裝置構成的測距系統,用于車箱寬度和橫向停車位置的測量。
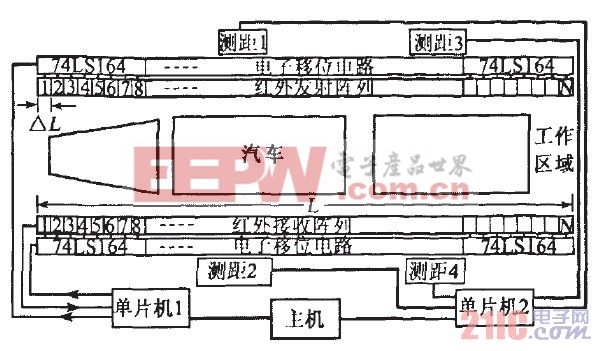
圖1 系統組成
其中紅外發射陣列和紅外接收陣列安裝于工作區域兩側車箱中部的高度,分別由N個發射模塊和N個接收模塊組成,它們均勻平行排列,收發一一對應。4個超聲波測距裝置安裝在工作區域兩側,分成兩組,分別測量前部車箱和后部車箱。
主機對縱向檢測和橫向檢測的數據進行綜合處理和分析,判斷出工作區是否有車、哪種車型,并計算出汽車在區域中的停車位置參數和車箱幾何參數。



評論