駕駛員輔助系統-自適應巡航控制系統(上)

本文談論的是自適應巡航控制系統(ACC),它的第一部分討論了 “環車感應系統”和作為全天候ACC系統基礎的調頻連續波(FMCM)雷達系統。
本文引用地址:http://www.j9360.com/article/197121.htm環車感應系統
幾乎每分鐘都有人在交通事故中喪失生命,受傷的人更不計其數。此外,交通事故帶來的經濟損失也成了天文數字。因此,汽車制造商和零件供應商一直致力于避免交通事故的發生,即便不能完全防止意外,至少也要減少因交通事故所造成的傷害。汽車安全性能得到改善很大一部分都歸功于汽車電子的發展。
對車輛碰撞和駕駛員反應之間關聯性的分析顯示,大量的交通事故都可以通過駕駛員及時發現危險并做出適當機動操縱而得到避免。為達到這項要求,我們可以為駕駛員提供適當的警告信號或讓車輛配備自動的縱向及橫向控制功能(駕駛員輔助系統)。我們還需要適當的傳感器來探測可能出現的危險,這類傳感器網絡必須覆蓋車身四周,同時提供適當的人機界面。
電子環車感應系統形成了許多駕駛員輔助系統的基礎,這些系統會發出警告或主動進行干預。駕駛員輔助系統的目標之一是避免車輛發生正面碰撞,危險警告系統及主動剎車控制系統可以大幅較少這類事故,自適應巡航控制系統(ACC)是達成此目標的第一步。
現有的ACC系統大都以毫米波雷達為基礎,主要分為脈沖系統和連續波系統;而連續波系統又可分為調頻連續波系統(FMCW)和擴頻系統。77 GHz FMCW雷達可以探測1-150m以內的物體,并算出它們與汽車之間的相對距離和速度。這類雷達只要安裝適當數量的天線,便能進一步分辨物體與車輛縱軸間的夾角。
環車感應系統——自適應巡航控制
環車感應系統(見下圖)構成了許多駕駛員輔助系統的基礎,它分為:
超聲波、雷達、視覺識別和導航系統;
被動和主動系統;
安全系統和舒適系統;
根據它們在系統內的功能而分的駕駛支援、被動安全、碰撞緩沖或車輛控制系統;
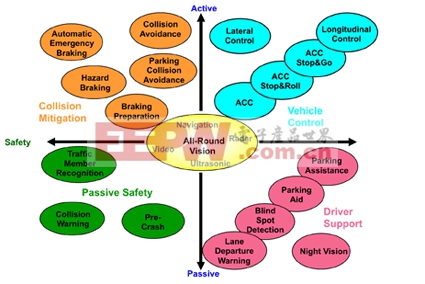
自適應巡航控制系統是車輛控制功能的一部分,它主動干預車輛的縱向控制。如果車輛與前車之間的距離小于預設的最小距離,那么,它們會迫使車輛減速;如果前后兩車之間的間隔距離足夠遠,它們就會把車輛加速到設定的速度。目前安裝于車輛的自適應巡航控制系統都以行車舒適為考慮,它們對于煞車的干預程度最大僅有剎車力的30%,車輛控制最終掌握權在駕駛員手中。因此,現有的自適應巡航控制系統特別適合車流密度較小的道路,例如快速道路或高速公路。
未來的自適應巡航控制系統將會采用更多傳感器,因此適合繁忙的都市道路。人們還能進一步發展出ACC Stop-And-Roll(SR)和ACC Stop-And-Go(SG)等功能,讓車輛在行駛之間能夠自動停止和重新前進,這樣一來車道將變得更安全,交通流將更順暢。這些駕駛輔助系統的最終目標是將車身的四周360度全都納入監測范圍,同時擴大自適應巡航控制系統功能以提供完整的縱向控制能力。
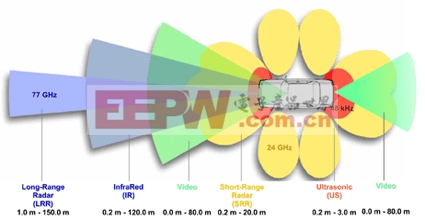
環車感應系統的傳感器
如上圖所示,監測車身四周需要有一系列不同的傳感器。紅外線(IR)和長距離雷達(LRR)這兩種傳感器都很適合于ACC系統。紅外線傳感器可用于LIDAR(光探測和測距)系統中,其探測距離最遠可達120米;77 GHz長距離雷達傳感器的監測距離可以延長到150米。與LRR傳感器相比,IR傳感器具有一個價格上的優勢,但也有個明顯的缺點,即在惡劣氣候下(如大雨、下雪、起霧或沙塵暴等),監測距離會大幅縮短。另一方面,雷達傳感器卻幾乎不受天氣的影響。雷達傳感器的另一個優點是它們能被隱蔽地安裝于汽車前端,例如77 GHz雷達天線就很小,幾乎能安裝于車身的任何位置。因此,目前大多數的自適應巡航控制系統都采用77 GHz長距離雷達。
ACC系統的主要任務是在前車距離過近時將車輛減速,距離足夠遠時加速。完成此任務所需的控制參數——車速和反應時間(見下控制回路圖)是由司機通過人機界面(HMI)來設定的(見下圖2(方塊圖))。整個控制功能是由傳感器控制單元(SCU)來提供。SCU的主要功能是控制ACC系統的傳感器和目標識別,其控制參數計算和相關系統啟動則是由ACC系統的電子控制單元(EUU)負責執行。
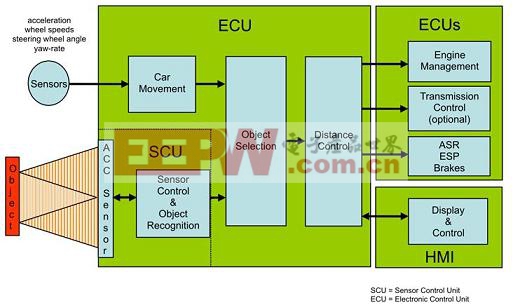
ACC系統傳感器的接收信號需要進一步處理。在目標識別時,系統會根據信號所含的信息來計算出潛在對象的距離和相對速度。車距控制需要從ACC雷達系統所探測的所有目標中精確地鎖定其中一個;鎖定目標時會用上車輛移動方面的信息,如加速度、車輪轉速、轉向角和偏航率。根據駕駛本身的車速和所要求的反應時間,ACC系統還可計算出所需的最小車距。
若在現行車速下計算出的車距過近,ACC系統就給適當的系統(如引擎管理,剎車系統)送出減速命令,從而調整車距。若調整后的車距已經足夠,車速就會被調至所需的速度。要做到這點,ACC系統須向相關驅動發出加速命令。若車輛無法保持最小車距,系統便會在人機界面上顯示所設定的反應時間和警告信號。下圖是自適應系統的各個元器件以及它們在車身的相對位置。
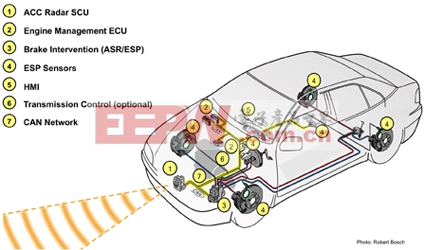
注:前輪驅動的汽車
ASR=加速滑移控制(牽引控制)
ESP=電子穩定系統(電子穩定控制)
調頻連續波雷達系統
現有的自適應巡航控制系統大多采用毫米波雷達系統,其中又以調頻連續波技術(FMCW)應用最為廣泛。FMCW雷達系統能同時探測出目標相對于車輛的距離和速度。若安裝適當數量的天線,它們還能計算出目標與車輛的縱軸夾角。
在調制周期內(tm),調頻連續波雷達的發射頻率會以線性方式在頻率偏移范圍內(調制范圍,fh)不斷改變。下圖A是包含三段斜波的發射信號頻率曲線。在發射機和目標都未移動的靜態系統中(見圖B),接收信號的頻率會落后于發射信號,其頻率差與發射機和物體之間的距離成正比。將發射信號和接收信號混頻會產生頻率較低的中頻信號,該中頻的最大值就叫做差拍頻率(fb)。
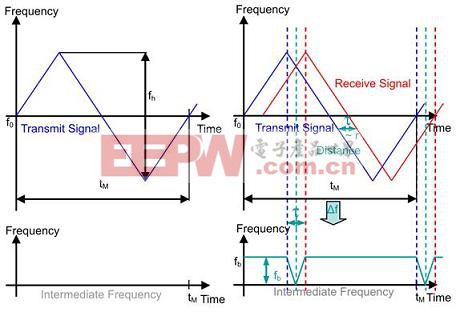
圖A、圖B
如果物體相對于發射機在移動,接收信號的頻率就會因為多卜勒效應而改變。物體接近時,接收信號的頻率會升高,物體遠離時則降低。若忽略發射機與物體的距離,以相對速度vrel接近就會產生如下圖C中的接收信號,此時中頻fd保持不變。將圖B與圖C中的頻率曲線相加在一起即可得到一個完整接收信號,它的中頻信號包含發射機與目標之間的距離和相對速度等信息(見圖D)。
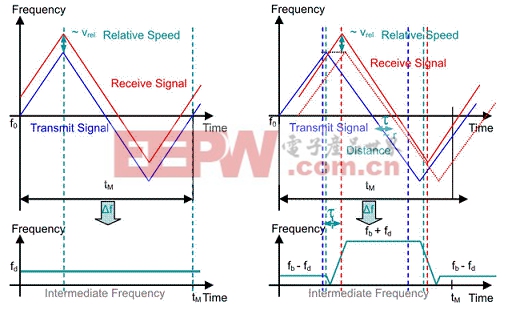
圖C、圖D
下圖E和圖F為發射機與物體以相對速度vrel遠離時的頻路曲線。
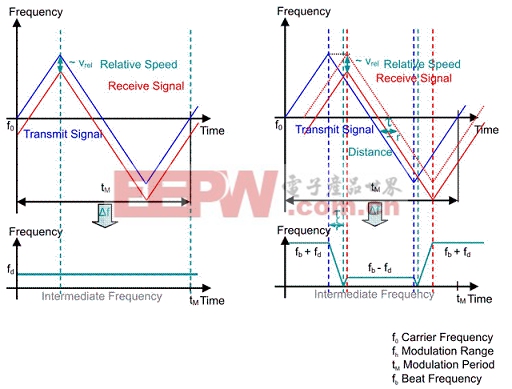
圖E、圖F
中頻可由調頻連續波雷達方程式表示成距離r和相對速度vrel的函數,其中相加代表發射機與目標逐漸接近,相減則代表逐漸遠離。
當c=光速
![]()
本文的另一部分討論ACC系統的硬件和軟件實現,以及雷達功能和算法。

評論