電動汽車控制系統之整車控制系統研究

前言
本文引用地址:http://www.j9360.com/article/196415.htm電動汽車控制系統的應用是當今汽車行業高新技術發展的必然趨勢,電動汽車控制系統的四個主要控制單元為電動汽車整車控制系統,電動機控制系統,充電機控制系統和電池管理控制系統。電動汽車整車控制系統由整車控制器、通信系統、零部件控制器以及駕駛員操縱系統構成,其主要功能是根據駕駛員的操作和當前的整車和零部件工作狀況,在保證安全和動力性的前提下,選擇盡可能優化的工作模式和能量分配比例,以達到最佳的燃料經濟性和排放標準。
一、 電動汽車整車控制系統及功能分析
1)控制對象:電動汽車驅動系統包括幾種不同的能量好餓儲能元件(燃料電池,內燃機或其他熱機,動力電池和/或超級電容),在實際工作過程中包括了化學能、電能和機械能之間的轉化。
電動汽車動力系統能流圖如下:
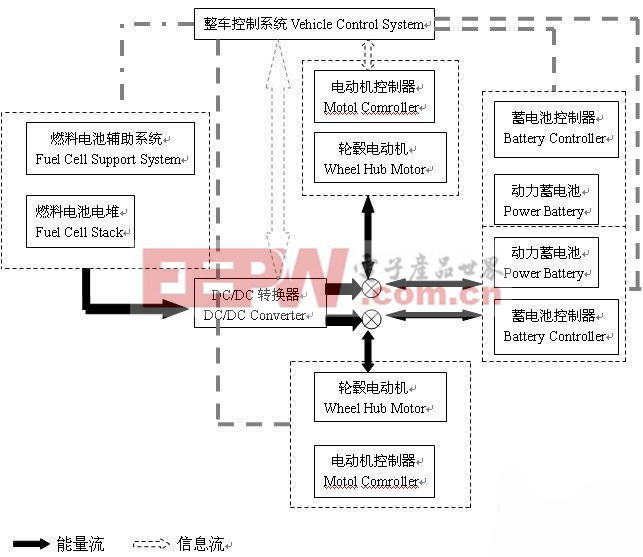
2)電動汽車整車控制系統結構:電動車動力系統的部件都有自己的控制器,為分布式分層控制提供了基礎。分布式分層控制可以實現控制系統的拓撲分離和功能分離。拓撲分離使得無力結構上各個子系統控制系統分部在不同的位置上,從而減少了電磁干擾,功能分離使得各個子系統部件完成相對獨立的功能,從而可以減少子不見得相互影響并提高了容錯能力。
3)整車控制系統對車輛性能的影響主要有三個方面:
① 動力性和經濟性
②安全性
③駕駛舒適性及整車的協調控制
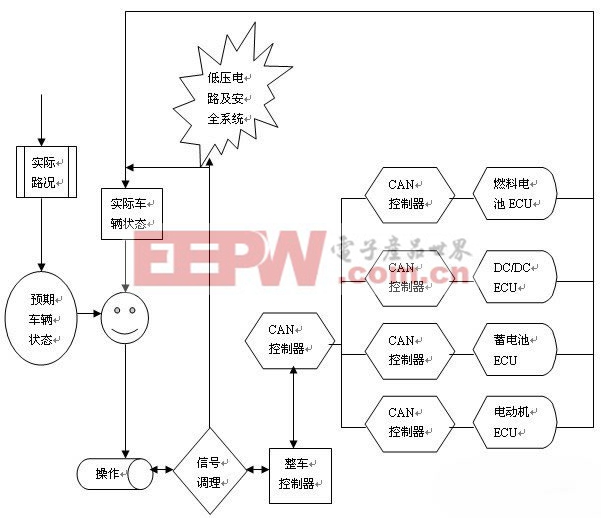
電動汽車整車控制系統如下:
二、電動汽車整車控制器
電動汽車整車控制器VCU(Vehicle Control Unit)是電動汽車整車控制系統的核心部件,它采集電機控制系統信號、加速踏板信號、制動踏板信號及其他部件信號,根據駕駛員的駕駛意圖綜合分析并做出相應判斷后,監控整車各單元的工作(包括驅動儀表顯示單元)。
1)整車控制器功能:整車控制器是控制系統的核心,承擔了數據交換、安全管理和能量分配的任務。根據重要程度和實現次序,其功能劃分如下。
①數據交互管理層②安全故障管理層③駕駛員意圖層④能量流管理層
2)整車控制器的開發
現在的ECU開發多采用V模式開發流程。V模型開發流程如下:
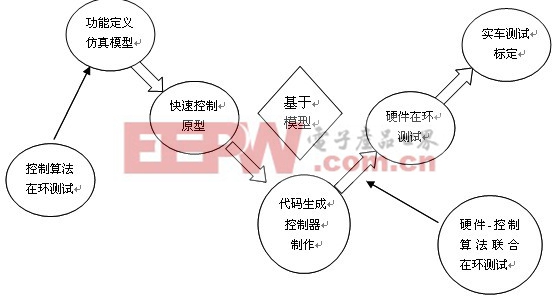
第一步,功能定義和離線仿真
第二步,快速控制器原型和硬件開發
第三步,目標代碼生成
第四步,硬件在環仿真
第五步,調試和標定
結束語
電動汽車控制系統是一個非常復雜的系統,整個電動汽車控制系統還需要與基于CAN總線和串行通訊總線的輪式驅動、電動汽車通訊系統和電池監控系統相結合,實現對車輛運行狀態的檢測、控制以及故障排除。近幾年國內電動汽車控制系統的研制已經有了很大的進步,隨著電動機及驅動系統的發展,電動汽車控制系統趨于智能化和數字化。變結構控制、模糊控制、神經網絡、自適應控制、專家控制、遺傳算法等非線性智能控制技術,都將各自或結合應用于電動汽車的電動機控制系統中。











評論