基于ARM+DSP的駕駛員眼部疲勞視覺檢測算法設計

如何為駕駛員提供一個有效實用的安全輔助駕駛系統是車輛安全駕駛的一個重要課題。基于機器視覺的疲勞駕駛檢測技術已在國內外開展了廣泛研究,其中以駕駛員眼部特征的檢測最為廣泛。
本文以低成本、低功耗、高實時性為設計原則,以ARM+DSP構成硬件平臺,并移植了嵌入式操作系統Windows CE 5.0,設計了一套基于駕駛員眼部特征的疲勞駕駛檢測算法,對駕駛員駕駛過程進行實時檢測和報警,從而提高駕駛的安全性與舒適性。
1 硬件平臺設計
系統硬件平臺選用三星公司ARM9架構的S3C2440作為核心處理器,利用TI公司的TMS320DM642作為視頻采集處理模塊,其結構框圖如圖1所示。DSP平臺主要負責采集圖像、圖像算法處理,ARM平臺主要完成整個系統的控制處理,兩者之間通過網口實現通信和同步。在系統運行過程中,ARM平臺可實時顯示采集到的視頻以及相應眼部疲勞特征識別的結果,同時用戶可通過觸摸屏交互界面對系統進行設置和控制。為保證系統平臺具有高的可靠性以實現復雜的系統調度,在設計過程中對本系統各平臺進行了操作系統移植,DSP平臺移植了DSP/BIOS系統,ARM平臺移植了Wince操作系統。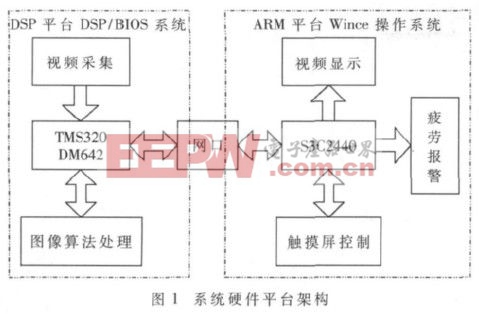
S3C2440是一款基于ARM92OT核的16/32 bit RSIC結構的嵌入式微處理器,主頻為400 MHz,最高可達533 MHz;片內外資源豐富,具有強大的處理能力。系統存儲擴展了64 MB的NANDFlash、64 MB的SDRAM;另外還有2 MB的NORFalsh,用于存放系統引導加載程序[1]。
TMS320DM642芯片[2]能夠實時高速地完成大數據量的數字視頻編解碼處理,是強大的高性能單片多媒體處理器,具有高質量、多通道、優越的視頻處理性能,以及完整的軟件可編程特性;基于C64x系列VelociTI.2DSP 架構的設計,與TI公司其他的C64x數字信號處理器代碼相兼容,擁有500/600 MHz時鐘頻率,性能高,其傳輸速率達4 000/4 800 MIPS;不僅具有C64x系列芯片的主要特征,還高度集成了音視頻等外部設備的接口,方便多媒體應用開發。
2 圖像識別算法
2.1 總體檢測流程
首先,根據臉部膚色的聚類特性檢測駕駛員臉部位置,在人臉檢測的基礎上,根據眼睛在人臉上的幾何位置分布,確定眼睛的大概位置,縮小眼部檢測的區域范圍;其次,在縮小的眼部搜索區域范圍內,利用Sobel邊緣檢測算法對眼部區域進行邊緣檢測,提取眼部的邊緣信息,并對其進行二值化處理;再對二值化后的眼部區域進行連通成分分析,采用基于區域連通的二值圖像濾波方法去除眼部周圍圖像噪聲點的干擾;然后根據改進的積分投影算法,計算左右眼角和上下眼瞼的距離,確定駕駛員眼睛的睜閉狀態;最后,定義眨眼頻率,并據此實現疲勞駕駛的檢測。具體的算法流程如圖2所示。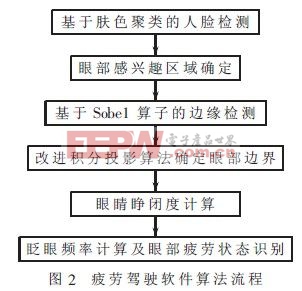
2.2 基于膚色聚類的人臉檢測
膚色對面部表情、頭部旋轉以及圖像尺度的變化不敏感, 但是人臉檢測的一個重要特征。在HSV 顏色空間, 圖像的照度和色度是分離的,膚色聚類更緊密, 不易受周圍光線的影響。因此, 本文采用基于RGB 和HSV 顏色空間的膚色聚類算法對駕駛員臉部進行檢測。從攝像頭采集的圖像為RGB 格式, 可以利用式(1)實現從RGB 顏色空間到HSV 空間的轉換[ 3]。
2.3 眼部感興趣區域確定
假設檢測出的人臉區域長度為HF、寬度為WF, 在豎直方向上, 眼睛大概位于臉部二分之一以上、頭頂以下
HF/5 的區域。在水平方向上, 眼部邊界區域被定位于距離臉部左邊界WF/8 處開始到距離臉部右邊界WF/8 處
的區域。根據上述原則, 初始眼部檢測區域為如圖3 中所示的矩形EFGH 區域。












評論