多智能體在城市交通系統中應用現狀綜述

1 引言
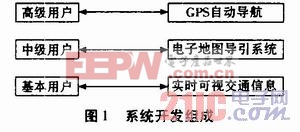
本文引用地址:http://www.j9360.com/article/196294.htmAgent 是運行于動態環境中的具有較高自制能力的實體,具有自主性、分布性、協調性和一定學習、推理能力。多智能體系統通過Agent 間的通訊、合作、協調和控制表達系統功能及行為特性。城市交通系統是自然的、分布的、復雜的、動態的、規模龐大的系統,采用多Agent 技術建模城市交通系統可為交通決策者和使用者提供良好的解決方案。從二十世紀80 年代末,就有學者將多Agent 技術引入到城市交通系統的建模中,利用其協作、存儲、智能性和自治性為使用者提供在線決策支持、實時交通控制,或利用其對客觀世界的準確描述進行交通系統運行仿真,發現交通系統中的問題、規律或驗證新的理論和算法。本文從ITS 框架中的先進的交通管理系統(ATMS)、先進的出行者信息系統(ATIS)、先進的公交系統(APTS)三個方面對Agent 技術在城市交通系統中的應用現狀展開論述,最后指出多Agent 技術在城市交通系統的應用中需解決的問題以及發展趨勢。
2 多Agent在ATMS中的應用
在ATMS 中,多Agent 技術主要用于提供實時的決策支持并進行適當的管理控制。根據Agent 慎思型和反應型兩種模型結構,建構基于Agent 的城市交通管理系統也有兩種思路:分層遞階式和完全分布式。
2.1 分層遞階式結構
分層遞階式結構的每一級都由功能、結構類似的Agent 組成,同級Agent 間可相互協調,上級Agent可作為對應下級Agent 的協調單元,下級Agent 向所屬上級Agent 傳輸局部系統環境和系統控制的反饋信息,為上級Agent 提供決策依據。最早的分層遞階式系統就是KITS 和TRYS.
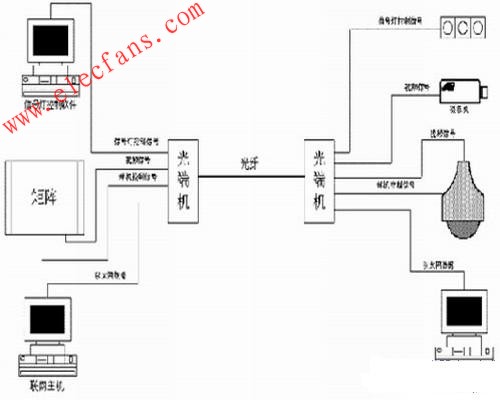
KITS 產生于在1992-1994 年間,將交通領域知識分解成與路網拓撲結構相匹配的單元集合,提供專門的推理機制進行交通決策和管理。如圖1 所示,底層的Agent 通過協作完成交通監控和管理任務,Actor 是直接和問題區域對應的交通評價和管理單元,Supervisor 負責全局路況分析、解釋以及合成全局行動方案。KITS 的成功表明:基于知識的模型可以和多Agent 技術相集合來提高城市交通系統的監控和管理能力。
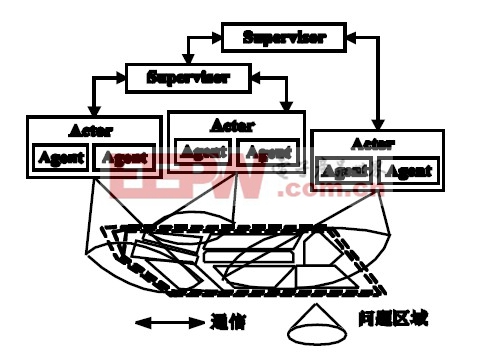
圖 1 KITS 架構圖
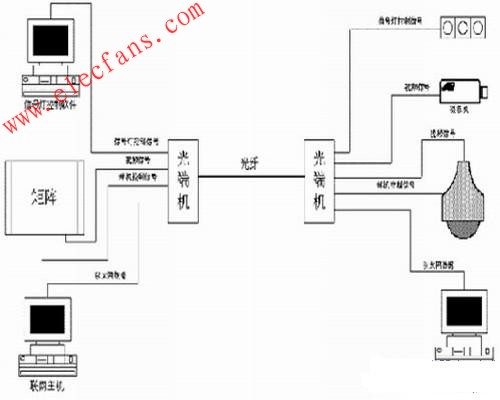
TRYS 是在1991-1994 年間建立的實時自適應的交通管理決策系統。如圖2 所示,TRYS 的結構與KITS 相似,通過Agent 訪問實時采集的路況數據,并由Agent 內部的知識庫和推理引擎對數據進行分析處理,coordinator 負責協調各Agent的工作以形成全局解決方案。與KITS 不同的是,TRYS 中的問題區域由獨立的、功能強大的Agent負責監督。
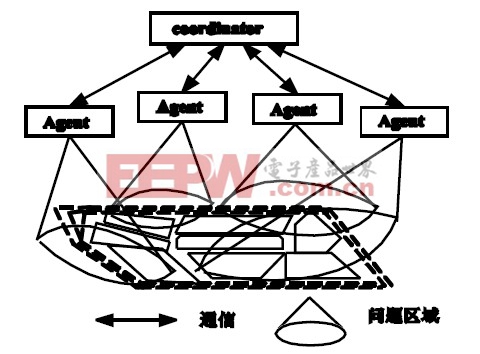
圖 2 TRYS 架構圖。
翟高壽和Choy根據遞階控制結構理論及城市交通系統的結構特征,提出了四層的分層遞階式結構,分別是:決策層(城市交通控制決策系統)、戰略控制層(若干區域協調控制系統)、戰術控制層(若干路口控制系統)、執行層(檢測器、信號控制器和信號燈等)。
該結構的協調控制策略在TRYS 基礎上進一步下放到了路口級,建立了路口Agent,每個路口成了一個智能的知識系統,可及時根據路口交通狀況進行控制策略的實時部署與調整,更好地適應了交通系統動態性、實時性強的特點,對突發性交通流的變化有很好的適應和調節能力。
2.2 完全分布式結構
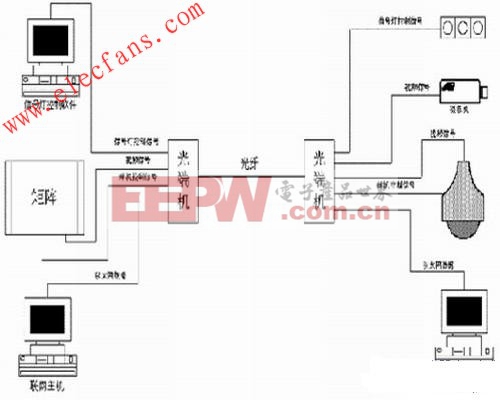
在完全分布式結構的系統中,Agent 憑借自身的知識和智能與相鄰區域Agent 協調共同完成路口的管制。最初的應用就是西班牙的TRYSA2 系統,如圖3 所示。TRYSA2 Agent 有一個控制計劃集,每個計劃都被賦予了能夠減輕交通壓力的效用值。系統可通過評估相關Agent 的計劃效用值合成系統最優的解決方案。Oliveira 、承向軍、楊兆升等學者也先后提出了以路口Agent 為基本控制單元的完全分布式控制結構,系統中的Agent 都具備了一定的存儲、匹配和智能計算功能,可依靠良好的協調算法實現多Agent 之間的協調與合作以達到整體優化和控制的目的。
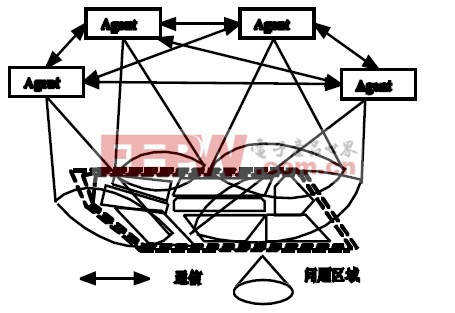
圖 3 TRYSA2 架構圖。
2.3 兩種架構的性能比較
分層遞階式充分體現了集中和分散控制的有機結合,考慮到了全局利益,可使協調有目的地進行,但是區域Agent 和主控Agent 的實現稍顯復雜。完全分布式具有反應快速、靈活性強等特點,可充分發揮Agent 的自治性、協調性,但由于Agent 自身能力有限、系統的知識又過于分散,解決全局問題的能力略顯不足,Agent 間的協調機制會對系統性能產生較大影響。在擴展性上,完全分布式只需把新Agent 注冊到其他Agent 中并修改相應的方案和知識庫即可將新Agent 擴充到當前的Agent 群體中,而分層遞階式需要整合區域控制中心和主控中心,重新賦予各Agent優先權關系。在協作復雜度上,分層遞階式從每一個Agent 控制方案中選擇一個本地最優的方案,完全分布式在所有的Agent 中通過搜索策略來查找最佳方案,因此后者工作量較大。
2.4 多Agent 的協調控制與優化
多Agent 通過協調實現系統的分布式并行運行,提高任務的執行效率。在基于多Agent 的ATMS 中,有三種協調方式:①建立專門的協調Agent;②將協調行為分散至各Agent 中,由Agent 自主地完成;③集中與分布相結合的方法,Agent 自身即可以完成某些協調行為,又可以接受高層Agent 制定的規劃。當前常用的協調方法有黑板模型、博弈模型、協調器、交換意見等。
黑板模型信息傳輸量大,對信息傳輸的穩定性也有一定的要求,適用于簡單的分布式多路口控制。博弈論模型適用于分層遞階結構的上下級Agent 間和完全分布結構的同級Agent 間的協調,但由于重復博弈過程中需要進行復雜的均衡點收斂控制,所以基于交通信息博弈的計算量較大。協調器可基于一定的目標將同級和下級Agent 產生的提案合成全局的提案。協調器降低了系統的通信量和其他Agent 的實現復雜度,但卻增加了協調器Agent 自身的設計復雜度和計算量。交換意見法對系統通信的穩定性有很大的要求,當單個Agent 節點出現通信故障時,系統將無法正常工作。

評論