基于LIN總線電動車窗防夾系統的設計

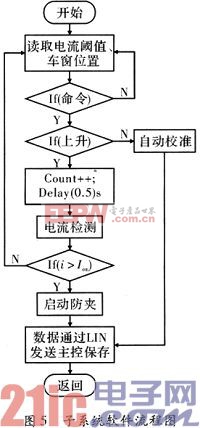
由于MM91217634沒有集成E2PROM,車窗的閾值電流Ion、車窗位置計數值count,均需要通過LIN總線發送到主控單元中進行保存,在上電啟動時,需要通過LIN總線去讀取車窗位置、主控的觸摸輸入,控制ACT212實現車窗的升降,在運行過程中實時對電樞電流進行采集,與閾值電流進行比較,同時要確定車窗的位置是否在防夾區域內,由于電機啟動時,電樞的瞬時電流可能會高于閾值電流,在啟動檢測電流時,需要一定的時間延時。若車窗的電流>Ion,車窗又在防夾區域內,則控制繼電器實施防夾。在車窗升降的過程中,MM912F634需要對霍爾脈沖信號進行計數,實時測量車窗位置,在防夾過程結束后,子控制器需要將當前的車窗狀態參數通過LIN總線反饋給主控器并進行顯示,子系統的軟件流程圖如圖5所示。本文引用地址:http://www.j9360.com/article/196153.htm
4 實驗測試
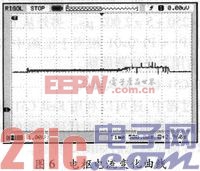
完成整個系統設計后,首先進行系統校正,測試出系統的各項參數,然后進行整體的防夾功能檢測。圖6所示為車窗在上升過程中,由電樞電流轉變的電壓變化曲線,在啟動時,電樞電流會有個瞬時增高,經過一段時間平穩后,車窗遇到了障礙物,電樞電流已超過閾值電流,并持續了一段時間,當車窗進入到防夾區域時,系統啟動防夾功能將車窗關閉,此時電流為零。經過反復測試,該系統能夠準確地實現防夾功能。
5 結束語
闡述了電動車窗防夾系統的設計,通過霍爾傳感器、電流檢測,實現了電動車窗智能防夾功能,并將其接入LIN網絡,通過主控液晶進行監測控制,提高了系統的集成度、降低了成本、方便駕駛員控制。通過安全實驗證明,該系統運行穩定,并且能準確地實現防夾功能。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理





評論