基于LIN總線電動車窗防夾系統的設計

2 防夾系統硬件設計
2.1 控制器
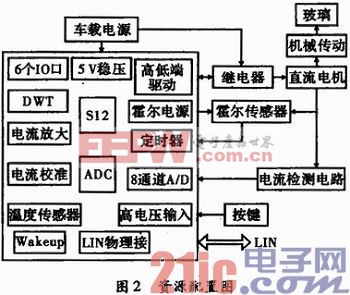
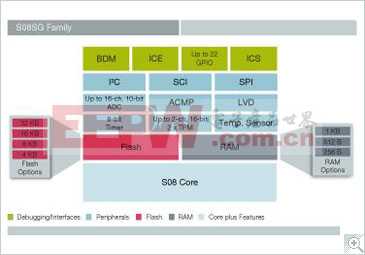
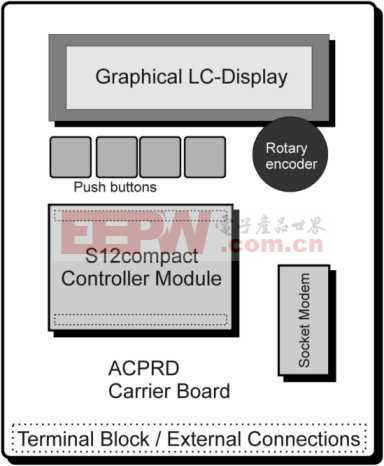
設計選取兩種微處理器分別作為主控制器和子控制器,型號分別為MC9S12DG128、MM912F634,這兩款均為Freesclae公司高性能汽車電子芯片,特別是MM912F634,內置集成穩壓器、電流放大器、LIN物理接口、大電流高低端驅動、溫度傳感器、模數轉換等功能模塊,外圍元件較少,有利于降低成本,節省硬件體積,適用于車載電子設備,資源配置如圖2所示。液晶模塊是駕駛員與系統相互連接的媒介,型號為Z2104,該屏幕為電阻屏,內置VGA控制板,與控制器通過串口進行通信,工作電壓為12 V。主控制器可以直接通過串口讀取液晶屏觸摸信號對液晶屏幕的畫面進行控制,將液晶屏幕的觸摸信號轉換成LIN總線指令,對子單元進行控制,同時,也能將車窗的狀態反饋給駕駛員。本文引用地址:http://www.j9360.com/article/196153.htm
2.2 車窗玻璃位置檢測硬件設計
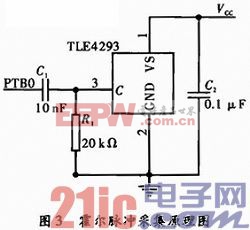
霍爾傳感器是電動車窗系統的主要信號采集元件。英飛凌公司的TLE4923霍爾傳感器,輸出的脈沖信號無需額外復雜的整形電路,輸出端(OUT)經過無源低通濾波器,直接連到MM912F634的PTB0,PTB0為定時器的一個捕捉通道,可直接對霍爾傳感器的脈沖信號進行計數,霍爾脈沖采集原理如圖3所示。
2.3 電流檢測及電機驅動硬件設計
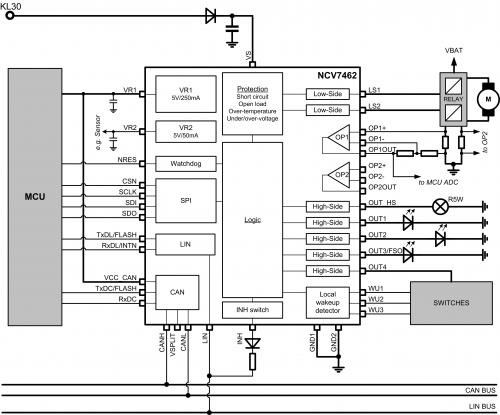
電機是實現電動車窗升降的執行器,每個車窗均配有一個直流電機,通過機械傳動實現車窗自行升降,電機驅動可采用兩種方式:一種采用MOSFET搭制的H橋電路,成本較高但性能穩定;另一種采用繼電器控制,成本較低且控制簡單。設計出于成本的考慮,選用繼電器控制方式,型號為松下公司的ACT212,MM912F634集成了高低端驅動器,可直接對ACT212進行控制,無需外搭繼電器驅動電路,具體原理結構圖如圖4上部分所示。
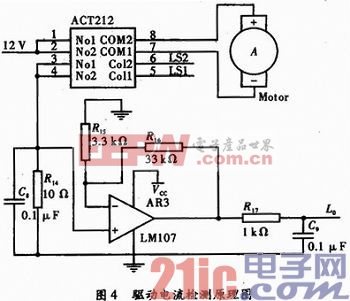
相關實驗表明,車窗玻璃在上升過程中,遇到障礙物的瞬間,電機軸的負載轉矩會突然增大。因此,電機軸負載轉矩變化率對障礙物較靈敏。然而,在實際應用中,電機軸負載轉矩卻不易測量。根據直流電機的特性,負載轉矩變化會引起電樞電流的變化,電樞電流的變化能夠間接地反應車窗的運行狀態,檢測電樞電流進而確定電動車窗的閾值力。論文采用直接測量方式,將一段康銅絲串入電機回路,康銅絲具有較低的電阻溫度系數,較寬的使用溫度范圍,加工方便,具有良好的焊接性能,可根據實際調試情況進行調整阻值大小,一般范圍為0~15 mΩ。電流檢測基本原理如圖4所示。
根據電路理論可得
![]()
電機電樞電流經過康銅絲轉換成電壓信號,經過濾波、放大直接接入。MM912F634的A/D通道,MM912F634的A/D轉換精度為10位,由式(1)可得A/D轉換結果uAD(t)
![]()
由式(2)可知,直流電機的電樞電流與A/D轉換結果uAD(t)之間是線性關系,因此,電機軸負載轉矩與A/D轉換結果之間也是線性關系,選擇A/D轉換結果的變化率作為障礙物檢測的判斷指標是合理的。MM912F634對A/D轉換數據進行處理,確定當前的車窗運行狀態,進行車窗的智能防夾,同時與主控單元進行總線通信,隨時發送子系統狀態。
3 防夾系統的軟件設計
電動車窗防夾系統主要包括主控和子單元兩部分,為增強主控的拓展性,主控系統軟件設計基于嵌入式實時操作系統,將μC-OSⅡ實時操作系統移植到MC9S12DG128中,每個車窗防夾為系統的一個任務,同時車身的其他控制也可以以任務的形式添加到主控系統之中。每個子系統采用中斷的方式進行檢測、控制,提高了系統的實時響應性。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理





評論