基于OBDⅡ汽車遠程監測系統的研究

這里以SJ1850(PWM和VPW)協議通訊為例,其輔助電路連接如圖3。
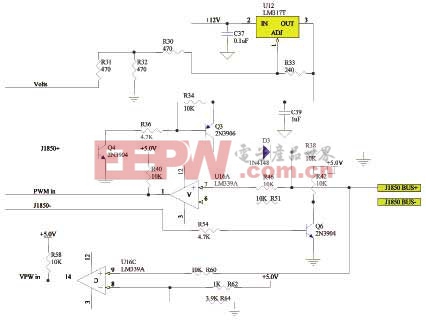
圖3 SJ1850協議通訊輔助電路
由于SAEJ1850的兩種不同協議需要兩種不同的電壓(VPW需要8V,PWM需要5V)。因此,采用輸出可調的電壓調整芯片LM317T。LM317T的輸出電壓由TL718的引腳J1850 Volts 控制。當引腳J1850 Volts輸出高電平時,在LM317T的輸出引腳上便可以得到8V的電壓;當引腳J1850 Volts輸出低電平時,在LM317的輸出端得到5V的電壓。
1)在使用J1850PWM協議時采用雙線制,從J1850 BUS+和J1850 BUS-上接收到的信號經過比較器LM339A的處理,傳輸到TL718的PWM in。需要注意的是,由于LM339A為開漏輸出,因此,要在比較器的輸出端得到+5.0V的高電平,需在該引腳添加上拉電阻R40。R46和R51為限流電阻,保護比較器不會因過流而損壞。
J1850信號的發送由TL718的4引腳 (對應于圖中J1850+) 和14引腳 (對應于圖中J1850-)完成。在沒有信號輸出的情況下,總線上保持隱性位。J1850+應保持低電平,此時晶體管Q4總是截止的,J1850 BUS+通過R38拉低,J1850 BUS+線處于隱性狀態。而J1850-應保持高電平,此時晶體管Q6導通,J1850 BUS-通過R42拉高,J1850 BUS-線也處于隱性狀態。此時,J1850 BUS+和J1850 BUS-上的差模電壓為-5V,經比較器輸入低電平到PWM in引腳。
反之,J1850+和J1850-都處于顯性時,J1850 BUS+和J1850 BUS-上的差模電壓為+5V,經比較器輸入高電平到PWM in引腳。
2) J1850VPW采用一線制。LM339A(U16C)的反向輸入端通過電阻R62和R64分壓,并保持在3.9V。在使用J1850 VPW協議的情況下,當J1850+輸出高電平時,晶體管Q4導通,Q3也導通,傳輸線J1850 BUS+上的電壓便被拉升到約8V,總線便處于顯性位。反之,J1850+輸出低電平時,總線處于隱性位。本系統接口設計選擇標準接口,相關診斷接口請參考ISO/DIS 15031C3。

圖4 DSP與TL718通信流程圖
系統軟件設計介紹
該系統采用XDS510-USB 2.0仿真器,它可以通過USB接口與PC機相連,在CCS集成開發環境下通過JTAG仿真接口調試、燒寫程序。其中,DSP對專用芯片TL718的控制程序流程如圖4所示。
TL718的16引腳BUSY指示當前狀態,如果當前狀態空閑,輸出為低電平,表示可接收新的命令。如果忙則輸出高電平。此外,TL718的15引腳RTS為輸入引腳,其低電平有效,當想要中斷當前正在處理的OBD命令時,可在該引腳上給低電平指令,同時檢查BUSY引腳狀態,直到指示TL718已經空閑。
結論
汽車遠程監測系統是涉及多學科的綜合性技術,針對汽車數量多、移動性強等特點,本系統主要通過高性能DSP對某些關鍵參數實施傳感器采集、與車載自診斷系統通訊相結合的方法,來實現對車輛運行參數的采集。該開發方案不僅具有適應多種協議車輛的靈活性和通用性,而且降低了開發成本,具有較高的經濟性。此外,其存儲參數也可以為汽車生產企業、維修服務企業提供資料參考。









評論