可精確測距的低成本超聲子系統

超聲傳感器電路比較簡單,在系統中負責發送超聲脈沖流,然后采集回波信號。器件發出的脈沖信號在空氣中傳輸,直到碰到一個目標物體并在此處產生反射回波。超聲傳感器通過檢測這些回波,并計算出發射脈沖與接收脈沖之間的時間差,從而確定脈沖波形的傳輸距離。發射脈沖的頻率范圍為40~200kHz,多數情況下使用40~50kHz頻率范圍的脈沖。
用于發射脈沖信號并檢測回波信號的硬件電路稱為超聲傳感器。有兩種類型的超聲傳感器:靜電超聲傳感器和壓電超聲傳感器。靜電型類似于一個電容器,由固定極板和移動極板組成。固定極板通常采用鋁,移動極板則采用帶有一層較薄鍍金層的聚酰亞胺。聚酰亞胺的作用類似于一個絕緣層,當信號(典型頻率為50kHz)作用在兩個極板時,金箔被吸向背板,產生超聲突發信號。
壓電型是利用壓電效應產生并測量超聲脈沖。傳感器將晶體或陶瓷材料黏接在金屬殼或椎體上,發射脈沖時,信號(通常為40kHz)激勵晶體,使壓電材料擴張或收縮,從而產生超聲突發信號。回波信號將使壓電材料震動,產生信號輸出。
計算距離
距離計算非常簡單,對于一個理想系統,一旦脈沖發射并檢測到回波后,即可利用下式計算距離。
距離=(傳輸時間×聲速)/2
但是,實際應用系統需要考慮延時偏差(零距離下系統的響應延時),上述公式修改為:
距離=((傳輸時間C系統延時偏差)×聲速)/2
對應于空氣溫度(Ta)的聲速(C)可以按照下式計算,單位為m/s。
C=331+0.606×Ta
另外,還需要考慮溫度的測量精度。
步程計設計
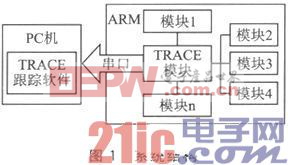
為了構建一個類似于步程計的便攜系統,可以選擇MAXQ610等低功耗微控制器,以節省計算功耗――其工作在12MIPS時電流只有3.75mA――停止模式下僅消耗200nA電流。控制器能夠工作在較寬的電壓范圍(1.7~3.6V),可在較長的電池放電過程中支持系統供電(見圖1)。
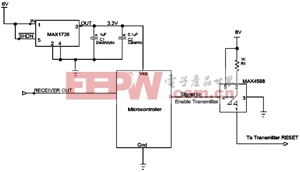
圖1 用類似于MAXQ610的微控制器構建的系統
微控制器和輔助電路用于完成發送、接收超聲脈沖的主要功能,脈沖發生器提供載頻等于傳感器諧振頻率的突發式超聲脈沖,回波檢測電路用于檢測反射信號。
許多應用中,發射和接收電路位于同一電路板,共用同一傳感器。這種情況下,微控制器可以產生突發信號并處理接收到的回波。而在步程計中,發射器安裝在一只腳上,接收器則安裝在另一只腳上。這種情況下,需要單獨提供產生突發脈沖的電路,而微控制器將處理收到的發射信號并計算距離。獨立的發射電路利用555定時器即可實現,隨后將詳細介紹這部分電路。首先討論微控制器是如何產生脈沖信號。
產生超聲脈沖
利用微控制器的紅外(IR)定時器可以產生超聲脈沖信號。定時器可以方便地編程脈沖頻率和持續時間(見圖2)。紅外時鐘(IRCK)頻率等于fSYS/2IRDIV[1:0]。其中,IRDIV[1:0]可以設置成1、2、4或8,IRCAH字節定義載波的高電平時間(按照IR輸入時鐘周期數定義),而IRCAL字節定義載波的低電平時間。
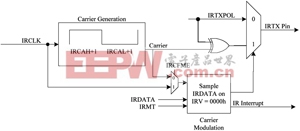
圖2 MAXQ610微控制器內部的紅外模塊定時器
IRTXPOL定義開啟/空閑狀態和IRTX引腳的載波極性,IRDATA決定是否在下一個IRMT載波周期將載波發生器輸出送至IRTX引腳。IRDATA=1時,載波在下一個IRMT周期輸出到IRTX引腳;IRDATA=0,IRTX引腳在下一個IRMT周期為空閑狀態。
在本例的開始,設置IRDATA=0使能IR定時器,載波時鐘不會出現在IRTX引腳。當IRV寄存器倒計數使IRV達到0時,設置IRDATA=1使載頻信號在下一載波時鐘輸出到IRTX引腳。同時,IRV寄存器重新裝載IRMT的數值。
在步程計設計中,突發脈沖發生器位于發送傳感器中,可以利用555定時器實現該功能。由555定時器構成簡單的振蕩器,振蕩頻率為40kHz,占空比為50%(見圖3)。選擇40kHz頻率的主要原因是傳感器在該頻率處增益最大。555定時器輸出與超聲傳感器連接在一起。
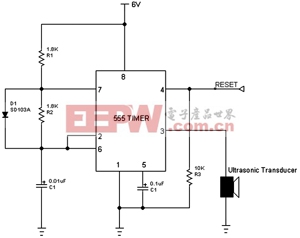
圖3 一種基于555定時器、簡單的突發模式超聲發生器



評論