一種高精度超聲波多路同步測距系統設計

0 引言
超聲波測距作為一種非接觸性的檢測方法,因其結構簡單緊湊、可靠性高、價格低廉、實時性強等優點,近年來已經得到了廣泛應用,如液位測量,修路過程中路面平整檢測,汽車倒車雷達,機器人輔助視覺識別系統等。但因超聲波在空氣中傳播時受到諸如環境溫度、濕度、風速等影響,傳統的超聲波測距系統精度普遍較低。文獻[4]采用了在系統中增加硬件溫度補償模塊僅在一定程度上可以避免因環境溫度變化帶來的測量誤差。文獻[5,6]中采用小波等處理算法,也并不能彌補系統本質上的缺陷。因此,研究了一種控制精度高,適用范圍寬的高精度多路同步超聲波測距系統。
1 超聲波測距工作原理與結構
1.1 工作原理
諧振頻率高于20 kHz的聲波被稱為超聲波。超聲波測距的基本工作原理是:發射探頭發出超聲波,在介質中傳播遇到障礙物反射后再通過介質返回到接收探頭,測出超聲波從發射到接收所需的時間,然后根據介質中的聲速,利用公式S=0.5ct就能算得從探頭到障礙物的距離,式中:S為所測的距離,c為超聲波在介質中的傳播速度.£為超聲波從發到收所經過的時間。
1.2 超聲波測距系統的一般結構
一般情況下,超聲波測距系統的基本結構如圖1所示。
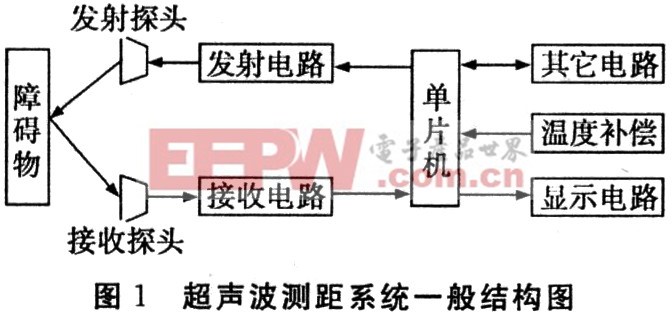
系統常采用頻率為40 kHz的方波信號由單片機內部產生。為了避免溫度對聲波傳播速度的影響,都采用溫度補償以適應在不同環境下正常工作的需求。時間的精確測量可由單片機內部單獨的計數器完成,也可由外部的計時電路完成。
2 多路同步超聲波測距系統
系統由單片機、FPGA模塊、6對收發同體的超聲波換能器、功率放大電路、回波高增益放大電路、帶通濾波電路以及比較整形電路等組成。系統組成框圖如圖2。
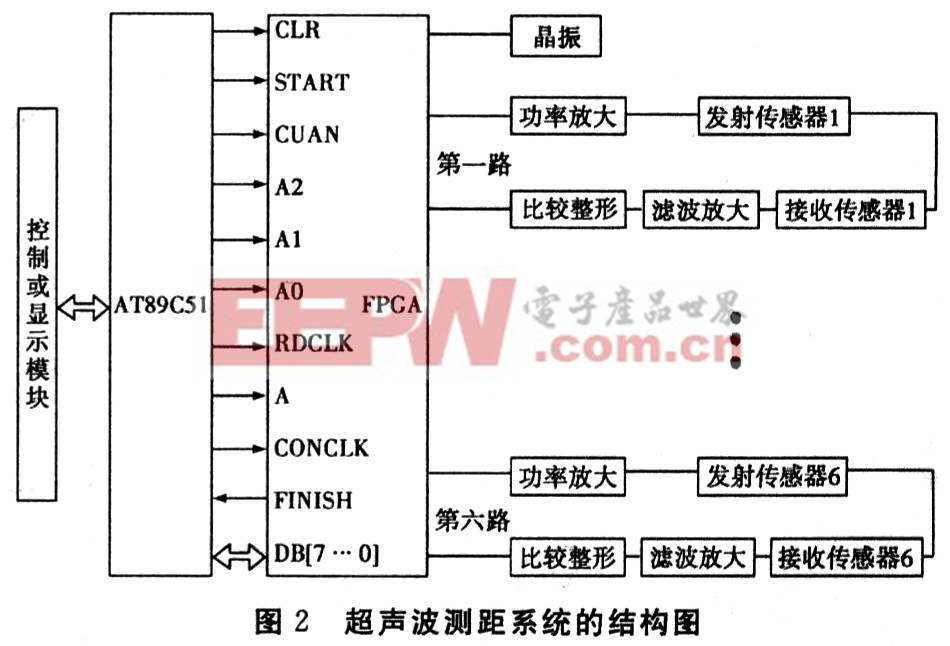
本系統中。單片機系統與FPGA系統是測距儀的核心部件,用來協調各部分元件工作。單片機控制器單元主要是啟動超聲波發射與計時計數器開始計數的同步以及接收到回波后對其計時計數器的值進行處理等運算。FPGA單元主要用來產生超聲波的發射脈沖頻率125 kHz與計時計數器的頻率(>170 kHz),通過微控制器MCU來啟動超聲波的發射,FPGA發射一定數量(這里選擇8至10)的脈沖串之后,停止發射同時啟動計時計數器計數,超聲波途經障礙物返回。當超聲波換能器接收到回波信號之后,將其信號送入FPGA內部,用來控制計時計數器的停止,將所得的計數值送入單片機。第一路到第五路超聲波換能器用于測量距離,測量距離的五路超聲波換能器按等間距分別安裝在測距儀的固定板上,系統采用收發同體的探頭,其波束角很小,有效的保證了各探頭到被測物體的垂直測量距離。第六路超聲波換能器安裝在測距儀的左側,在測距儀的右側安裝一塊標準檔板,較準確的測量當時環境下的聲速,用于溫度補償。控制或顯示模塊用于調整平衡或輸出顯示測量距離的目的。
2.1 發射電路
發射電路如圖3(a)所示。發射電路將接收到的方波脈沖信號送入乙類推挽放大電路,用其輸出信號驅動CMOS管,接著將其脈沖信號加到高頻脈沖變壓器進行功率放大,使幅值增加到100多伏,最后將放大的脈沖方波信號加到超聲波換能器上產生頻率為125 kHz的超聲波并將其發射出去。










評論