B類LXI儀器總線同步觸發技術

0 引言
步入信息化時代最顯著的標志是信息網絡在各行業中的滲透和普及,其中數以太網最為典型。以太網作為一種成本低廉、吞吐能力強、適應性好、網絡管理能力日益提高的網絡,在各個領域都得到了廣泛的應用。基于LAN的新型LXI(LAN eXtensions for Instrumentation)儀器總線正是利用了以太網的這些特點,構成了一種適應自動測試系統的儀器模塊組建標準。
LXI總線標準是由安捷倫公司和VXI技術公司于2004年9月聯合推出的,并于同年成立了技術聯盟。一年后聯盟制定了LXI 1.0標準,此標準對LXI的物理特性、觸發同步、儀器模塊間通信、模塊網絡接口特性和配置以及發現機制等方面作出了詳細規定,并且在其他方而也給出了聯盟的建議。2006年8月LXI聯盟正式公布LXI的1.1標準,糾正了1.0標準中存在的大量排版和語句上的錯誤,并修改了部分內容,包括修改了HTTP和HTML請求、刪除14節的MAC地址規則等等。期間第一批通過LXI聯盟認證的LXI儀器面世,也揭開了LXI產品迅速升溫的序幕。2007年10月聯盟又推出了1.2標準,直至2008年9月推出最新的1.3版標準,不同版的標準都對其上一版進行修改和完善。在過去兩年里,LXI產品逐步成為市場熱點,到目前為止,超過50家國際頂尖儀器生產廠商共推出85種儀器類型的540余種產品。其中僅在2007年上半年時的銷售額就超過了1億美元。
在中國,LXI聯盟成員已經包括中國大學、研究機構和廠商在內的約100多家單位。北京航天測控公司等三家中國企業加入了LXI聯盟。2007年在北京召開的首屆LXI亞洲峰會上聯盟主席也誠摯地邀請中國的企業單位參與標準的制定和完善。在我國的各軍兵種和國防工業部門為武器裝備研制配套的ATS(Automatic Test System)系統,也離不開LXI總線的發展。
1 B類LXI同步原理
1.1 LXI產品分類和B類儀器的優勢
LXI聯盟充分利用了以太網觸發、網絡時間協議(NTP和IEEEl588)和硬件連線觸發功能。在此基礎上LXI提供精度由低劍高的三種觸發機制:基于NTP的觸發方式;基于IEEEl588的觸發方式;基于LXI觸發總線(LXITrigger Bus)的硬件觸發。并根據這三種不同的機制將產品分為三類:C、B和A類。分別如下:
C類:具有通過LAN的編程控制能力,能夠與其他廠家的儀器協同工作;
B類:擁有C類的所有能力,并支持IEEEl588精確時間協議同步;
A類:擁有B類的所有能力,同時具備觸發總線硬件觸發機制。
顯然A類具備最高的同步精度是靠增加了硬件觸發功能,然而根據LXI標準可知,此類觸發是通過在儀器模塊之間另外增加觸發總線實現的,且該觸發總線的長度又不超過3m,故極大地限制了LXI儀器的靈活性,而靈活性又是LXI和VXI等儀器所具備的特點。B類儀器所支持的IEEEl588精確時間協議不需要額外硬件開銷,同樣也是通過LAN傳送觸發信號,靈活方便。所以對B類同步觸發精度的研究具有極大的現實意義。
2. 2 IEEEl588時間協議同步原理
IEEEl588又稱為精確同步時間協議(Precision Time Protocol,PTP),它在LXI儀器模塊中的實現是要求硬件和軟件共同支持,它的同步原理如下圖l所示。在由LXI儀器模塊所組成的ATS中,IEEEl588時間協議同步的理想目標是使分散在各個LXI儀器模塊中的時鐘達到絕對的一致,但由于同步誤差的存在,現實中只能接近這個理想值。這里將系統中的LXI設備分為主、從機,基本同步原理是:在系統初始化階段,通過對主從機之間時鐘偏移量(offset)的測量修正主機和從機之間的時鐘偏差,在設定的時間間隔內(一般默認1~2s),主機循環發送一個唯一的同步信息到相關的從機;主機測量發送的準確時間,從機測量接收的準確時間,之后從機發送攜有接收準確時間信息的數據包至主機,主機產生一個接收時間標記,接收的時間在延遲響應包中返回給從機。偏移測量和延遲(delay)測量完成了主機與各從機之間的同步,使系統使用統一的時鐘協調完成任務。
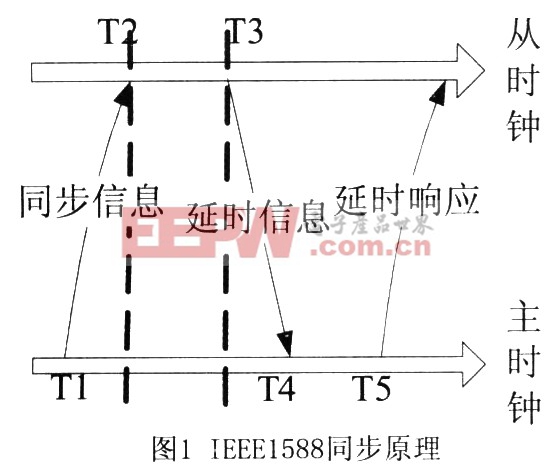
根據上述闡述,假設在主、從時鐘接發信息包的時刻分別為T1、T2、T3、T4、T5;主時鐘到從時鐘和從時鐘到主時鐘的延時間隔分別為delayl和delay2。詳見圖l。
故我們得到如下式子:
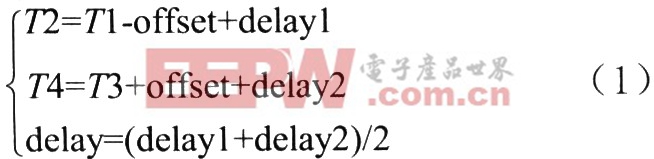
假設網絡是對稱的,即主機到從機和從機到主機的延時是一樣的,可以得到:

如此便得到了offset和delay。
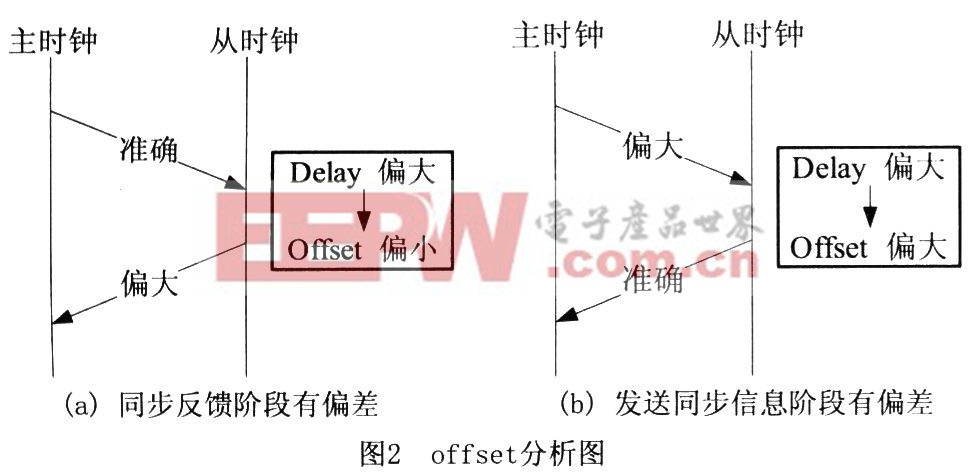
2.3 同步誤差來源和糾正方法
分析整個同步過程,可以將誤差來源歸結為兩大類:a.系統或儀器內部因素;b.系統或儀器外部因素。
內部因素主要來自傳輸線路的延時、系統的網卡中斷的響應、消息排隊等。從網絡和系統的角度看,可以將上述因素歸結為線路的不對稱性,從而直接影響到對offset和delay值的計算。offset和delay值是相互影響的,即得到準確的offset值就同樣得到了準確的delay值,所以可只研究offset值。
在offset值的計算過程中,由于上述線路傳輸、路由功能、等待排隊等等現象的存在,導致對offset值的測量和計算結果有偏差。在此我們可以將上述誤差原因看作影響噪聲,故當offset值初步穩定(初始化后第一次同步時計算出來的offset值不定)后可以采用濾波算法將其濾除。當進行完晶振同步之后,可以簡化理解為offset偏差直接反映傳輸線路的不對稱,即直接反應內部因素導致的誤差。





評論