基于ARM9和μC/OSII的多頻道數據采集系統設計

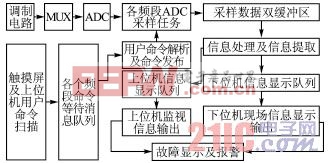
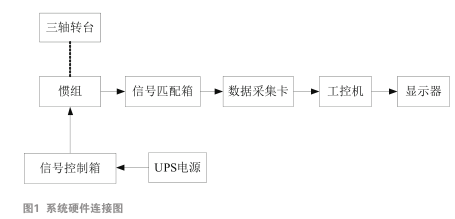
引言 隨著IT技術、電子技術、通信技術、以及自動控制技術的飛速發展,對工業現場數據的高速實時采集就成為電子產品和工業控制技術發展不可避免的一個環節。 本文針對高速實時多任務數據采集中的多任務實現算法以及實時性、實效性和高速性的要求,提出了基于ARM9和μC/OSII操作系統的智能化設計方案,實現了任務優先級動態調度、系統工作參數動態設定、系統內部軟件智能化設計,針對低速外圍設備進行了系統優化,并提高了系統可靠性改善了內部任務同步性。 1 整體電路設計 整個采集系統的硬件電路如圖1所示。首先利用多路調制電路對12路信號進行調制,這部分包含相應的信號轉換、抗干擾、以及初步的信號處理等,使得各路采集信號能夠達到ARM9內核對信號采集的要求。經多路選擇和ADC采樣后進入ARM9內核。為了實現對整個系統工作狀態的實時監視、實時控制和實時調節,設置了上位機監視器和現場顯示觸摸屏,將用戶所有要求顯示的信息在上位機顯示輸出或者在現場LCD同步顯示輸出。采樣按照采樣頻段分為高頻段(300~200 ksps)、中頻段(200~100 ksps)、和低頻段(小于100 ksps)3個頻段,每個頻段由4個外部采樣通道組成。ARM9內核與上位機的通信利用UART和RS232轉換電路來實現。系統工作電源由統一的電源供給,在實現電壓轉換后對PC機和ARM9內核以及相應的工作電路提供電源支持。 圖1 數據采集系統硬件電路 2 系統總體軟件設計思路 系統的軟件設計原理如圖2所示。12路采集信號經調制電路多路選擇和ADC采樣后進入各個采集任務內部通道。每一路采集通道都設計獨立的數據采集、數據存儲、數據處理以及數據提交任務。也就是說,每一路外部采集通道都對應一個獨立的內部數據通道,而且本通道數據只在本通道內進行存儲、處理和傳遞。各個內部數據通道任務之間只有在系統調度時執行時間上的先后關系、優先級關系,沒有數據耦合關系。 圖2 系統軟件設計原理圖 命令掃描部分由獨立的上位機和下位機掃描任務完成對上位機監視器和下位機觸摸屏的實時監控,一旦檢測到用戶命令,立即將其發送給命令解析和處理任務,由該任務對用戶命令進行分析處理。命令處理完后將提取的結果發送給用戶要操作的采樣通道,使之按照用戶要求運行。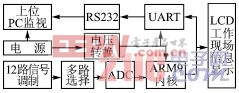








評論