高精度太陽能聚光雙軸定時跟蹤控制系統設計

1.2 平臺框架結構
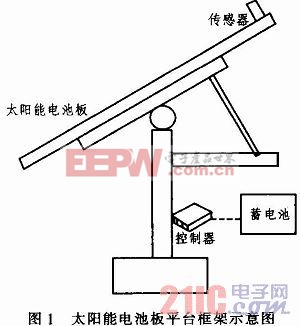
全自動太陽能聚光跟蹤控制系統主要分為太陽能電池模塊框架平臺和太陽能自動跟蹤控系統。太陽能自動跟蹤系統主要用于驅動太陽能電池板框架。早晨太陽升起,太陽能電池板框架由初始位置自東向西自動跟隨太陽相對運動的方向,按間歇方式分段轉動,從而使光伏發電系統的太陽能電池板框架保持在較大的功率輸出狀態。日落后,太陽能電池板框架回轉復位至初始位置,并處于休眠狀態。框架的機械部分采用雙軸機械跟蹤定位方式。主要由電池板框架平臺、底座、兩個轉動軸(方位軸、俯仰軸)和直流電機構成。整個太陽能電池板安裝在框架平臺上。跟蹤裝置設計成雙軸機械跟蹤定位系統,可以同時在方位角和俯仰角兩個方向上同時進行位置跟蹤。在驅動電路的作用下可以使電池板框架平臺在水平方向上0~270°和垂直方向上的0~85°自由旋轉,以滿足全天的太陽軌跡跟蹤。太陽能電池板平臺框架示意圖如圖1所示。本文引用地址:http://www.j9360.com/article/193785.htm
2 跟蹤控制系統設計
2.1 系統硬件設計
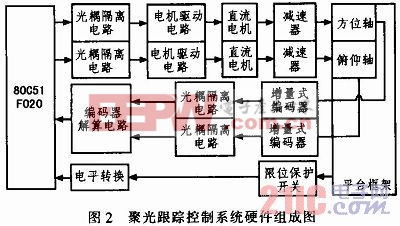
太陽自動跟蹤控制系統主要由單片機最小系統、傳感器信號處理電路、電機驅動電路等幾部分組成。整個控制系統可以完成如下功能:在設計跟蹤時間內都能正對太陽;夜間自動返回原始工作位置;在轉動機構失效時,使框架平臺停止工作運轉;間歇性工作方式,降低能耗。單片機選擇的是美國Cygnal公司推出的高性能C8051F020系列單片機,主要考慮到其具有極佳的最小功耗設計環境。聚光跟蹤控制系統硬件組成圖如圖2所示。








評論