基于PC104的低空測試儀測控程序設計與實現

摘要:低空測試儀試驗需要把整個測試儀作為吊艙掛在直升機下工作,能適應各種惡劣的自然條件,用于某飛行部件地海雜波環境下的測試。以PC104嵌入式計算機為硬件平臺,標準C++為開發工具,針對低空測試儀數據采集需求開發了測控程序。通過電平I\O控制電源板給各信號加電時序,A\D卡實時采集信號,高度表通過串口回傳高度數據。著重介紹了低空測試儀的軟硬系統設計方案,給出了一組測試數據,驗證了測控程序的有效性。現場應用表明,該系統具有設計合理,操作簡便,測試準確的特點,達到了設計要求。
關鍵詞:低空測試儀;直升機;PC104總線;數據采集
低空測試儀需要作為一個整體吊掛在直升機下,這就要求測試儀體積小、實時性好、工作溫度范圍寬、可靠性高、能適應各種惡劣自然條件,并有持續的高速數據采集能力。而嵌入計算機PC104,憑借其體積小、功耗低、集成度高及模塊化等一系列優良品質,滿足此要求。而且,PC104在嵌入式應用設計中,除了有顯示要求的情況外,通常作為一種“黑匣子”的工作模式,即沒有顯示。而低空測試儀就是后者的應
用。數據的下載是通過插入U盤自動下載的,不需要拆卸拆卸硬盤下載數據,方便多次測試。
1 測控系統需求分析
通過對測試儀測試原理的分析及操作流程的分解細化,在系統設計時主要考慮一下幾點:
1)測試儀不僅要能夠在有地海雜波的情況下對某產品的相關輸出信號進行持續的采集,而且采集信號的同時記錄產品距離地面或海面的高度;
2)在硬件上采用成熟的平臺,使系統集成度高、可靠性高和維修性強;
3)采用定時數據采集控制方式,因直升機上不讓使用無線遙控裝置,可在起飛前設置好延遲時間,起飛后當預定的延遲時間到時,自動開始數據采集,也可設置采集停止時間;
4)采集的數據可通過U盤自動下載,然后導入地面計算機中進行分析和處理;
5)地面計算機能確定哪些數據超過規定的門限值及對應的高度,并對數據進行分段FFT處理分析;
根據低空測試儀試驗測控需求的特點可以歸納出對測控系統的性能需求,主要包括:
1)數據記錄時長≤1 h;
2)采集速率≥100 ks/s;
3)測高范圍1~1 200 m。
2 測控系統總體設計
該測控系統結構如圖1所示,在對被測產品的測試過程中,通過控制系統控制供電系統,給被測產品、嵌入式計算機和無線電測試儀供電;嵌入式計算機控制給被測產品各信號加電時序,何時開始采集數據和何時停止采集;一次試驗結束后,通過U盤導入地面計算機進行分析。
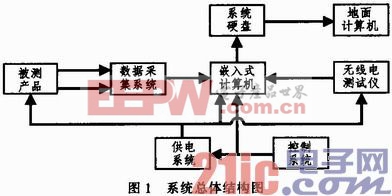
圖1中除了地面計算機外,其他的設備都需要密封在玻璃鋼下。這就要求玻璃鋼能裝下被測設備、數據采集系統、蓄電池等,具有一定氣動力形狀,具有兩個水平翼和一個垂直尾翼,減少飛行中的阻力,被測設備的天線位于吊艙的底部和高度表天線位于吊艙的水平翼上。
3 測控系統硬件設計
如圖2所示,測控系統硬件主要PC104電源板,PC104CPU板,PC104數據采集卡,PC104繼電器開關板和無線電測高儀組成。
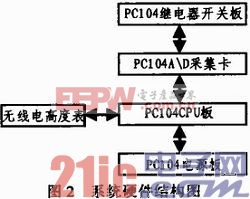
PC104電源板用于為PC104 CPU板提供高效、穩定的12 V電源。PC104 CPU板控制A\D采集卡實時采集每通道的數據,速率為200 kS/s;通過串口采集無線測高儀的數據,速度為25 Hz;繼電器開關板用于按時序給產品加-18 V,+18 V和+27V。
無線電高度表是測量飛行器相對地面(海面)垂直高度的距離測量系統。主要有主機、收發天線和連接電纜組成,如圖3所示。





評論