基于GL Studio的雷達顯示器仿真

3.5 航跡線的繪制
目標航跡仿真的步驟:先計算并保存由航跡得到的目標實時位置姿態數據,然后通過這些航跡點繪制航跡線,最終將其顯示出來。在該假設條件下,目標在系統運行時間驅動下運動。當掃描基線旋轉的角度和目標的方位角相等時,將目標的斜距、方位角坐標保存到相應數組中,由此顯示出航跡點的極坐標并動態繪制航跡線。假設雷達轉速為6 r/min,圖4為系統運行時間t在不同時刻所對應的目標回波、航跡點和航跡線。圖4中用粗黑點表示航跡點,航跡序列中最新的一個航跡點處的深灰色短線表示雷達“掃出”的目標回波。在GL Studio中,雖然可在內存棧上用new()分配內存,動態畫線卻不能回收分配的內存。可通過動態設置事先畫好的一條直線的位置、頂點個數及頂點參數來改變該直線形狀。適當調整實時得到一組航跡點數據后,將其作為函數VaSetVertices()的參數來改變事先畫好的航跡線形狀。
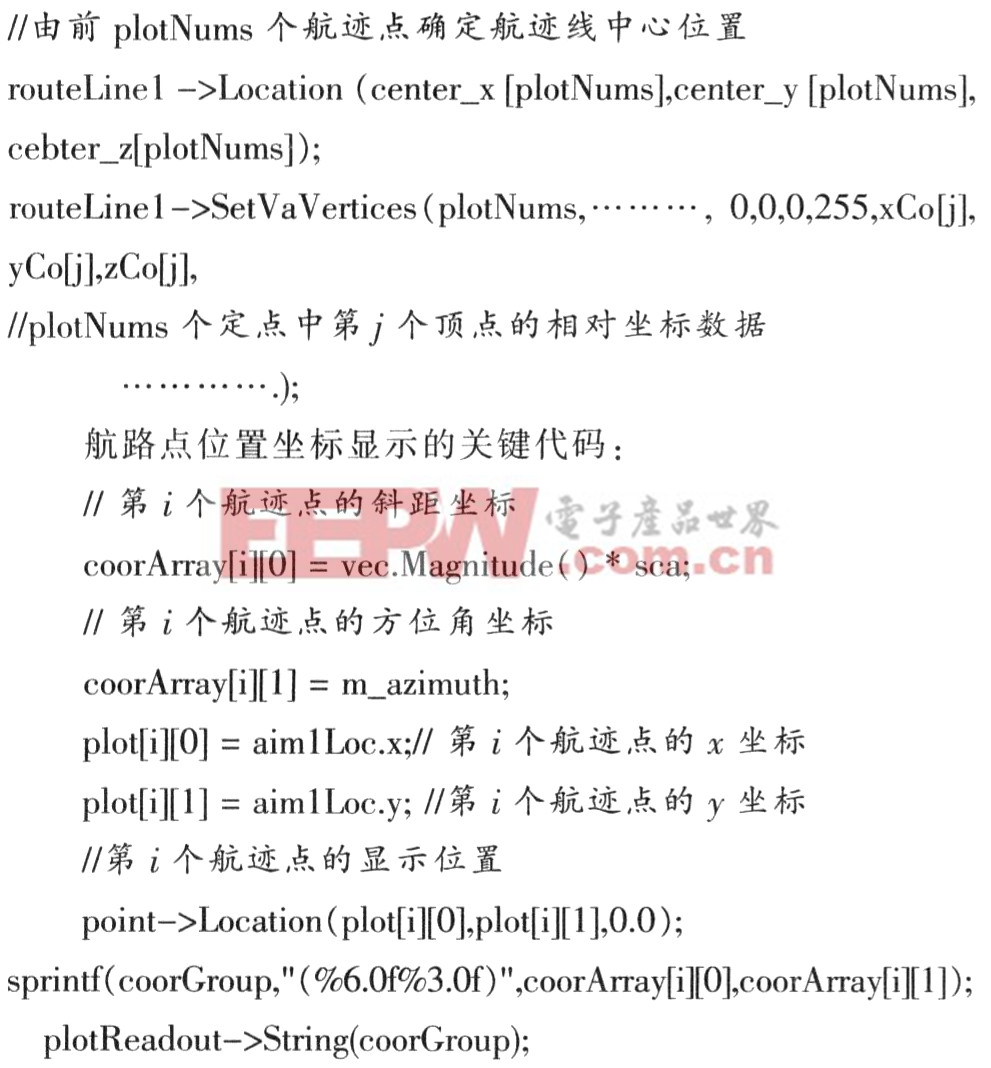
因為函數VaSetVertices()中的頂點位置參數均為相對于航跡線中心點位置的相對數值。因此需轉換航跡點數據。關鍵代碼為:
3.6 數據顯示
在仿真雷達顯示器中,采用固定刻度。由于顯示器上只能目測獲得目標粗略的斜距和方位角數據,因此有必要提供其他的數據顯示作為補充。在仿真顯示器右側提供一個數據窗口,以顯示航跡點的極坐標數據。在實際運用中,雷達仿真系統中數據處理機等傳遞來的二次信息中,目標的其他參數(如速度、姿態角)也可在此實時顯示。
3.7 仿真實現與結果分析
采用C語言對GL Studio進行二次開發。單獨編譯生成的源代碼,實現雷達顯示的仿真。圖4為不同仿真時間的仿真截圖,由圖4看出,掃描線掃描時有逼真的余輝效果,當波束掃到目標時,目標被“點亮”,隨后逐漸消失,直至再次被波束掃到。在動態繪制目標軌跡線過程中,當航跡點數超過航跡序列中預設數(本仿真中預設為8個) 時,序列中最早的航跡點數據自動消失,最新的航跡點數據加人到序列最前面,參見圖2a和圖4。圖2a中有7個航跡點,圖4a、4b、4c中分別有8、9、 10個航跡點,但只顯示最新的8個。結果表明:首先對所需顯示的圖符進行靜態建模。可對仿真結果有了直觀認識。基于GL Studio的顯示器仿真開發,可減少用高級語言編程實現所需的工作量,且畫面清晰,運動目標軌跡流暢。生成的代碼可封裝成一個類,應用于其他仿真系統中。
4 結束語
研究雷達顯示器仿真實現有重要意義。采用具有應用程序接口(API)的仿真軟件GL Studio實現雷達顯示器的仿真。在該軟件的基礎上二次開發減少了工作量,且畫面美觀流暢,具有較高的真實感和實時性。可將生成的代碼添加到Vega Prime或其他基于OpenGL的環境下,加入到雷達仿真系統中以實時響應其他仿真模塊傳輸來的一次、二次雷達數據。








評論