FPGA在新型激光光幕靶中的應用

4 主要模塊邏輯實現及仿真
本系統主要包括3個模塊部分:并轉串控制模塊,數據采集處理模塊,上傳模塊。系統工作過程為:FPGA每隔5.34μs不間斷采集光電二極管陣列數據,當子彈穿過靶面時,如果采集到的數據不全為0,則先臨時存儲,然后判斷數據是否有效,無效則報警,有效則進行處理,最后通過RS232串口上傳給上位機處理顯示,上傳成功后存儲模塊清零。其總流程圖如圖3所示。本文引用地址:http://www.j9360.com/article/189602.htm
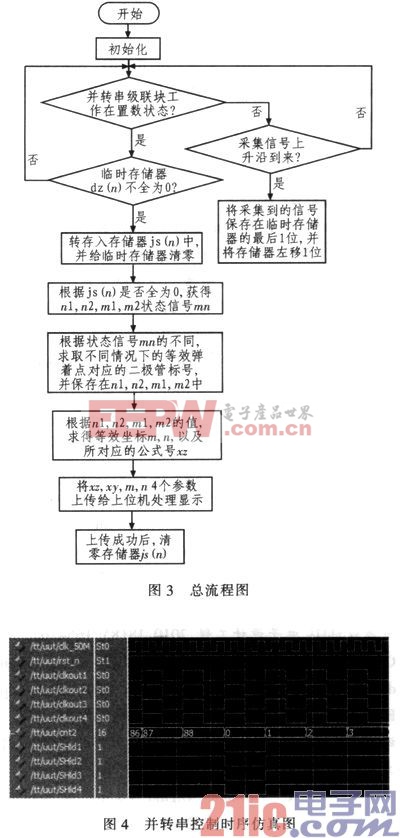
4.1 并轉串控制模塊
主要功能是產生各個74LS165級聯塊需要的60 ns的時鐘信號elkout,和周期為89個clkout的移位控制信號,仿真結果如圖4所示。
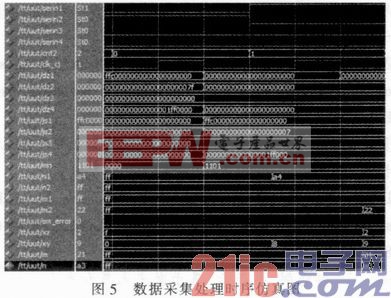
4.2 數據采集處理模塊
主要功能是在elk_ci采集信號控制下采集中間位置的數據,將上次鎖存的各個光電二極管陣列的數據通過移位從高到低存儲在臨時存儲dz1,dz2,dz3,dz4中。在cnt2=0,即移位置數控制信號工作在置數狀態時,若子彈穿過即dz1,dz2,dz3,dz4不全為0,則轉存在js1,js2,js3,js4中(由于后4位未連接到光電二極管,后4位不保存)。根據js1,js2,js3,js4是否0,可以判斷被遮擋的光電二極管處于n1,n2,m1,m2的哪邊(與mn的4位對應)。由于子彈射擊位置不同,遮擋的光電二極管的數量也不同,若子彈直徑為4.6 mm,光電二極管間隔為2.5mm,則遮擋的二極管為1~18之間。判斷數據是否有效,若無效則報警。若n1,n2只有一邊被遮擋,則只需要找到彈著點對應的光電二極管編號。若n1,n2都有光電二極管被遮擋,則不僅需要找到等效彈著點對應的光電二極管編號,還要判斷等效彈著點是位于n1那邊。還是n2這邊。同理處理m1,m2。最終得到彈著點對應的位于n1,n2,m1,m2的光電二極管的編號,由于是從1開始編號,最終要得到是在n1,n2,m1,m2上的等效距離,相應的n1,n2,m1,m2要減1。最終得到彈著點坐標對應的參數m和n,以及相應的公式編號,仿真結果如圖5所示。
4.3 上傳模塊
主要功能是,將得到的最終彈著點坐標參數通過RS232串口上傳給上位機處理顯示,仿真結果如圖6所示。

5 結論
仿真結果表明:由FPGA組成的數據采集、處理裝置應用在新型激光光幕測坐標系統中,不僅繼承了光電靶的眾多優點,還解決了傳統激光光幕靶處理器I/O緊缺、處理速度慢,存在錯報、*****報等缺點,可實現靶場對于彈丸坐標采集所要求的響應速度快、可測連發的要求,而且比傳統的用單片機,單片機CPLD與單片機結合,FPGA與單片機結合的采集處理裝置結構更簡單,體積更小,成本更低。












評論