基于Proteus的遠程抄表系統設計與仿真


圖3 集控器的硬件電路
CD40174芯片的Q0~Q3分別接至AT89C51的P1.0~P1.3。同時,7411芯片產生的負脈沖信號送至單片機的INT0,以便有智能終端脈沖產生時,使CPU能產生中斷,進行采集。對P1.0~P1.3進行循環查詢,則可知采集的脈沖數來自哪個數字表,采集程序流程如圖4所示。
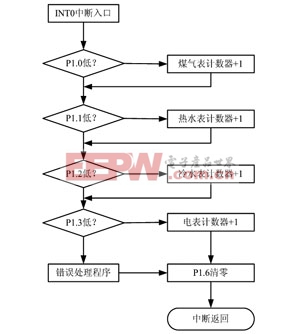
圖4 采集程序流程圖
系統軟件系統設計
系統的軟件設計主要包括兩部分,一是采集器和集控器的C語言編程,二是上位機的控制程序編程。這里主要介紹上位機程序編程。上位機操作平臺采用VB編程,與網絡的聯系通過一個通用控件Winsock來完成。Winsock控件對用戶來說是不可見的,它提供了訪問TCP和UDP網絡服務的方便途徑,通過設置控件的屬性并調用就可輕易連接到一臺遠程機器上去,并且還可雙向交換數據。它提供了兩種傳輸模式,即TCP和UDP。由于TCP模式是一種面向連接的傳送方式,在傳送數據前,通信雙方必須都收到對方的回應信號才能啟動數據的傳輸,因而占用了大量的時間用來完成握手信號的傳送,而UDP模式是一種快速存取數據的通信方式,發送與接收都不需要重新建立聯機,節省聯機的時間,本設計中采用UDP模式。軟件系統設計選擇了用Vista透明窗體風格,主要包括軟件登陸模塊、用戶管理模塊、系統設置模塊、抄表設置模塊、數據管理模塊、計費設置模塊等部分,其中大部分模塊設計中都涉及到了數據庫操作。
結語
該系統克服了傳統有線抄表方式的弊端,傳輸數據量大、準確性高、通信費用低。其基于Proteus技術,組網靈活、易于擴展,使設計與施工的難度和成本得以降低,具有良好的開放性、可靠性和可擴充性,有著重要的現實意義與廣闊的發展前景。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論